Meie teenuseid kasutab 700+ ettevõtet
Oleme paigaldanud üle 9000 seadme
Erilahendused tellija vajadustest lähtuvalt
Kütusevargused on toimunud läbi aegade ja igapäevaselt varastatakse ka täna, varastama jäädakse edaspidigi. Kütus on siinkohal top10 kuuluv aine, mis on alati konverteeritav ja alati kaubaks läheb. Ega siis asjata rahvasuus naftat mustaks kullaks kutsuta. Vargused leiavad aset võrdselt igal pool. Pole õige väide, et selle taga on meie kultuuriline taust. Sarnaselt toimuvad kütusevargused Euroopa heaolumaades – Rootsis, Saksamaal, Prantsusmaal.
Kütusevarguse ärahoidmiseks tuleb selle asetleidmine võimalikult keerukaks muuta. Lukkude puhul on oht, et kütuse kättesaamiseks lõhutakse ka paak. Seda on esinenud ja sel puhul on kahju eriti suur. Pluss risk sattuda võõral maal, võõras keeles sekeldustesse kohalike võimudega, kus halvimal juhul võib asi lõppeda kohapeal uue paagi ostmise ja paigaldmisega. Kujutage siin ainuüksi ette ajakulu ja veo ümberkorraldamise keerukust kellegi kolmanda pealesunnitud seisaku tõttu.

Pildil näha kütusevarguse tõttu lõhutud veoauto kütusepaak.
Kütuseseire on maksumuselt tühine kulu võrreldes ainuüksi turvatava kütusekogusega. Soovitan soojalt!
Kütusetaseme valve kütusevarrastega on end tõestanud lahendus, mis ei ole küll uus, kuid aastatega oluliselt arenenud. Tänapäevased süsteemid on täpsemad ja raskesti petetavad – isegi väike, ca 10-liitrine kütusekadu käivitab viivitamatult alarmi.
Nutikas valvesüsteem aktiveerib samal ajal nii vaikse häire kui ka kohapealse sireeni, mille tulemusel jätavad ehmatunud vargad sündmuskohalt põgenedes sageli kogu varustuse maha – sealhulgas ka juba välja tõmmatud kütuse.
Tegemist on efektiivse ja ennetava lahendusega, mis on end praktikas korduvalt tõestanud.
Lisaks usaldusväärsele toimivusele peitub selle lahenduse suurim väärtus erakordses tasuvuses, sest valvatava kütusekoguse kõrval on investeering peaaegu olematu. Pole juhus, et ettevõtted, kes on süsteemi juba kasutusele võtnud, ei kujuta end ilma selleta enam ette ning see on üks neist harvadest investeeringutest, mis tasub end kiiresti ära ja jääb kindlalt kasutusse.
Loe kütusevarraste kasulikkusest omaniku seisukohast.
Kirsiks nutika platvormi tordil on peidetud trumpkaart – otseühendus turvafirma Forus häirekeskusega. Kui kütusekao häire käivitub ja kliendil on Forusega leping, ei jää see pelgalt digitaalseks märguandeks. Forus saadab kohale patrulli, kes reageerib kiiresti ja tabab pahategija otse teolt.
EX sertifitseeritud
Usaldusväärne, stabiilne, 24/7 toimiv lahendus kõrge ohutasemega keskkondades, mille iseloomustavateks võtmesõnadeks on kergestisüttiv ja plahvatusohtlik. Täpne, täisautomaatne, hooldusvaba, ei mingit inimlikku faktorit. Ettenähtud diisli, bensiini, kütteõli ja vedelgaasi taseme mõõtmiseks. Leidnud kasutust ka Adblue ja veetaseme mõõtmisel.

Kulumõõtjaga tarbimise mõõtmisel kaasneb paratamatult teatav süstemaatiline viga, mida ei saa kompenseerida. Mõõteseadme enda kulumise tõttu kasvab nimetatud viga määramatult. Vea tulemusel erinevus mõõdetu ja tegeliku vahel pidevalt akumuleerub ning ühel hetkel leiad end paratamatult olukorras, kus faktiliselt on aine otsas, kuid pideva mõõtmise arvestamise järgi mitte. Asjaosalised on nõutud, kuid süüdlane puudub. Pole välistatud olukord, kus situatsiooni kurjasti ära kasutatakse. Taoliste ebameeldivate üllatuste vältimiseks on vajalik paralleelselt mahu mõõtmine nivooanduriga.
Milliseid kitsaskohti sellega lahendatakse?
Esiteks on alati piisavalt täpselt teada kütusejääk ja seda kusagil mahutil külmas ja märjas kõõlumata ning käsi ja riideid määrimata.
Teiseks teab süsteem jooksvalt tarbimist ning pakub ise välja järgmise täitmisaja.
Kolmandaks aitab süsteem korraldada täitmislogistikat üleüldse.
Neljandaks pakub mõõtmissüsteem erinevaid analüütika võimalusi, mis põhinevad hetkemahu pideval perioodilisel registreerimisel.
Kui keeruline seda kasutusele võtta on?
Nivoo mõõtmine toimub rõhuanduriga, mis uputatatakse mahutisse. Anduri mahutisse juhtimiseks on vajalik ühe ja veerandtollise ava olemaolu. Kui seda pole, siis põhiraskus taandub augu puurimisele. Kõrge ohutaseme tõttu puurmasinat otse mahuti külge panna ei tohi. Erinevatel mahutitel on kaane maha- ja tagasimonteerimine erinevava töömahukusega. Aega võib kuluda 30 minutist mitmete tundideni. Muus osas on tööd minimaalselt. Seade on patareitoitega ja ilmastikukindel, lisakaableid juurde vedada pole tarvis. Kõik on tehtav enimalt tunniga. Patarei kestuse pärast ei maksa muretseda. Voolutarbelt on lahendus üliökonoomne, patareist piisab kümneks aastaks. Sisuliselt sobib suvalisele mahutile.

Rõhuandurid on ettenähtud sügavustele kuni 3m ja kuni 5m. Täpse mõõtetulemuse tarbeks on tarvilik mahuti gradueerimistabel (10cm sammuga vedelikusamba kõrgus ja sellele vastav maht).
Vedelgaasi puhul on lugu hoopis lihtne. Nivoo mõõtmine toimub kontaktivabalt Halli anduriga ning kasutusse läheb olemasoleva anduri pesa. Kogu paigaldus ja kasutuselevõtt on tehtav 20 minutiga.
Kuidas toimub täitmislogistika korraldamine?
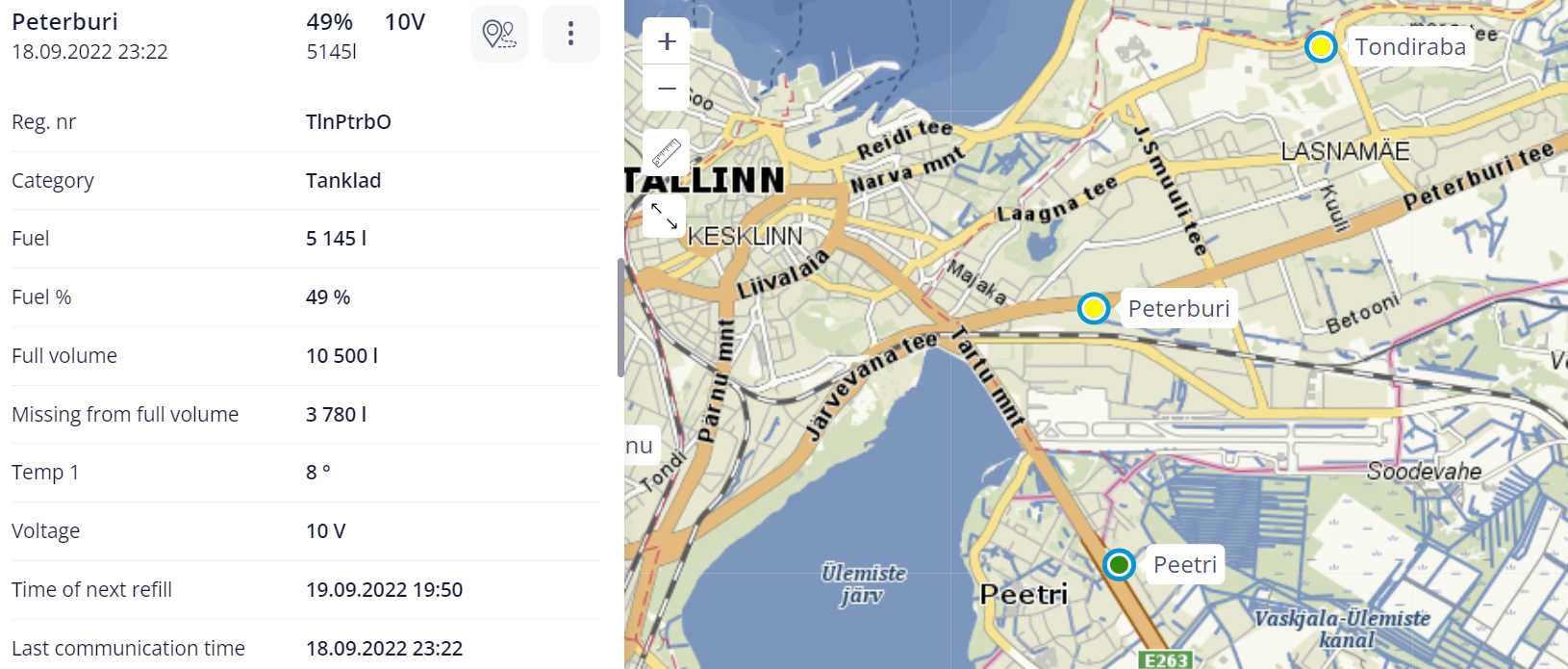
Sõlutvalt hektetäidetusest (üle poole, alla poole ja alla kolmandiku) on mahutite asukohad kaardil markeeritud erinavate värvidega. Sisuliselt võimaldab see hetkega hoomata, kui kui palju on ning saada pidepunktid logistika korraldamiseks.
![]()
Hiireklõps kaardil toob esile valitud mahuti detailandmed – hetkemahu, täismahu, temperatuuri, patareipinge. Juhindudes viimase päeva tarbimisest annab süsteem prognoosaja järgmiseks täitmiseks.
Perioodiliselt registreeritud näitudel põhineb analüütika. Kasutaja saab koostada aruandeid võrdleval kujul ja sorteerida andmeid tarbitud või sissetangitud mahtude järgi. Aruanded toovad esile päevade tarbimisandmed koos alg- ja lõppjääkidega. Aruandeperioodid on vabalt määratavad. Mahuteid saab jagada gruppidesse. Andmeajaloost on näha, missugune oli millalgi hetkejääk mingis kindlas mahutis. Samuti võimaldab andmestik tagantjärele hinnata täitmislogistika optimaalsust.
Mida kasulikku kaasneb veel?
Kokkusobivus tanklate haldusprogrammiga Cloudics. Mõningase administreerimistegevuse tulemusel saavad kütusejäägid nähtavaks Cloudics’s. Need inimesed, kes on harjunud igapäevaselt kasutama Cloudics’t, pääsevad jääkidele ligi oma tavapärasest süsteemist.
API olemasolu. Klient saab liidestada Metroteci omaenda infosüsteemiga ning transportida automaatselt enda infosüsteemi Metroteci poolt toodetud andmed.
Klient saab enda kliendile „nähtavaks teha“ mingi osa mahutitest või siis kasutada Metroteci aruandevorme enda kliendile andmete serveerimiseks ja info jagamiseks.
Kasutuskohad
Kommertstanklad. Pidev teave erinevates asukohtades paiknevast varust. Kui suur on kusagil varu, millal on järgmine täitevajadus ja missugune maht on vajalik tarnida. Väärtuslik info täitmislogsitika korraldamiseks.
Diiselgeneraatorid. Kütusetaseme kaugmõõtmine diiselgeneraatori mahutites tagab töökindluse, võimaldab nivoo reaalajas jälgimise, mahuti õigeaegse täitmise, aitab vältida raiskamist ja lekkeid. Kasulik on see kriitilise tähtsusega seadmete elektritoite tagamiseks ja mitmes erinevas asukohas paiknevate generaatorite haldamisel.
Eratanklad. Farmides, ehitusplatsidel ja teetöödel kasutatavate privaatmahutite juures aitab kütusetaseme kaugmõõtmine hoida masinad pidevas töös, vältida ootamatuid seisakuid ning lihtsustab täitmise planeerimist. Tarbimisaruanded formeeruvad automaatselt, mis teeb kütusekulu jälgimise mugavaks ja ajasäästlikuks.
Veetaseme mõõtmine. Karjääride operaatorid peavad Keskkonnaameti nõuete kohaselt regulaarselt mõõtma vee sügavust, et tagada tööohutus, keskkonnakaitse ning kaevandustööde nõuetekohane planeerimine.
Referentsid
Lahendus on kasutust ja hekaskiitu leidnud Alexela, Olerexi ja Tartu terminali teenindusjaamades. Seadmed on kasutuses LPG mahutitel, diisli ja bensiini tsisternidel. Nii maapealsetel kui ka maa alustel. Vaata lähemalt LPG ja vedelkütuse taseme mõõtmise kohta tsisternides siit https://metrotec.ee/referentsid/
Online mõõtmislahendus LevelSense annab mahuti täituvusest igal ajahetkel täpse ülevaate. Side katkemisel käivitub alarm. Vaata lähemalt siit https://metrotec.ee/lpg-taseme-mootelahendus-levelsense/
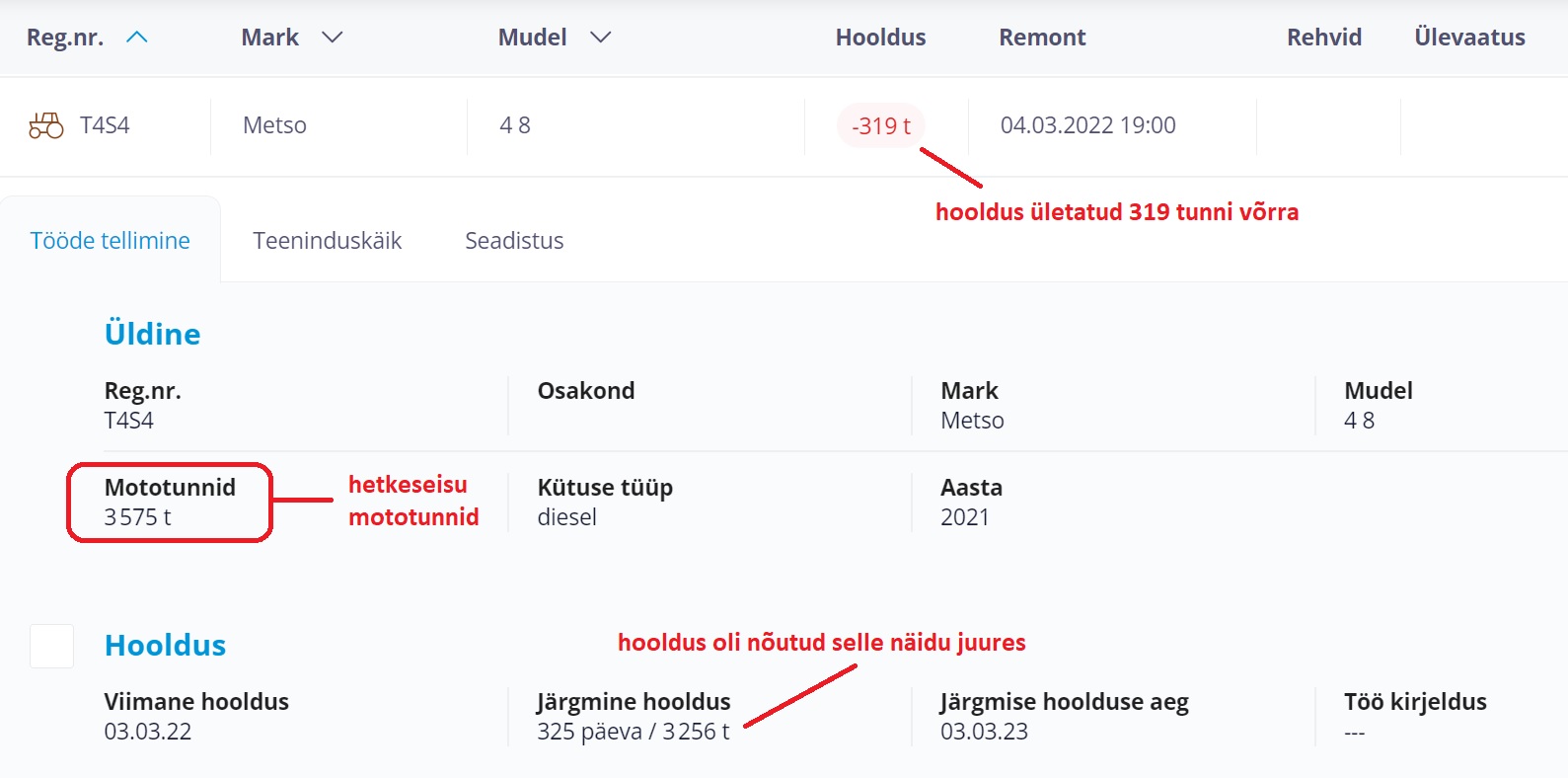
Enamasti on teada, kui palju mototunde mingi tehnikaühik ära on töötanud ja paljuks masin veel suuteline oleks. Küll aga valitseb virr-varr teeninduste ja remontide osas. Seda kaootilise organiseerituse ja korrapäratu dokumenteerituse osas. Käsitsi kirjutatud hooldusvihikutesse ei jõua kõik kanded arusaadaval kujul, rääkimata pildi ja failimaterjalist. Ja kui peetakse exceli tabelit, siis enamasti suudab seda lugeda üksainus inimene, kes vajalikul momendil pole kättesaadav. Kohati sõidavad hooldus- ja remondipäevad asjaolistele sisse järjekordse üllatusena tuues endaga kaasa liigset sebimist, ajakadu, töö ümberkorraldamist ja teinekord ka leppetrahve.
Lahendus sasipuntra korrastamiseks on elektrooniline hoolduspäevik. See on abivahend teenindusaegade broneerimiseks ja meeldetuletamiseks. Automaatselt esiletõstetud andmed, kui mõni teenindustähtaeg on lähenemas või hooldusaeg broneerimist vajab, võimaldavad ühelt poolt ajavaru remondi planeerimiseks ja teiseltpoolt meenutavad tähtpäeva lähenemist või ületamist.

Hetkenäit on kõigile kättesaadav. Hooldenäidu arvutab välja programm.
Hooldusest peavad olema teadlikud kõik - tehnikajuht, meeskonnajuht, masina operaator ja hooldaja ise. Tehnika vajab puhastamist, hooldeks ettevalmistamist. Varuosad vajavad tarnimist, treiler tuleb tellida, operaatorile anda vaba päev.
Hoolduste tähtajad pakub programm välja eelseadistatud välpade alusel arvestades seejuures kogu aeg ka jooksvalt äratöötatud mototunde. Erinevatel kasutajatel on juurdepääs programmiandmetele. Info on nähtav kõigile asjaolsalistele. Niisamuti on asjaosalistele nähtav ka see, kui tehnikajuht on fikseerinud konkreetse remondi või hooldusaja. Märkamatult ja lärmi löömata on remondid korraldatud ning kõik teadlikud.
Kes ei tahaks olla hea peremees. Esimene ja lihtsaim viis selle näitamiseks – pea arvestust, kuidas sa oma varaga ümber käid.
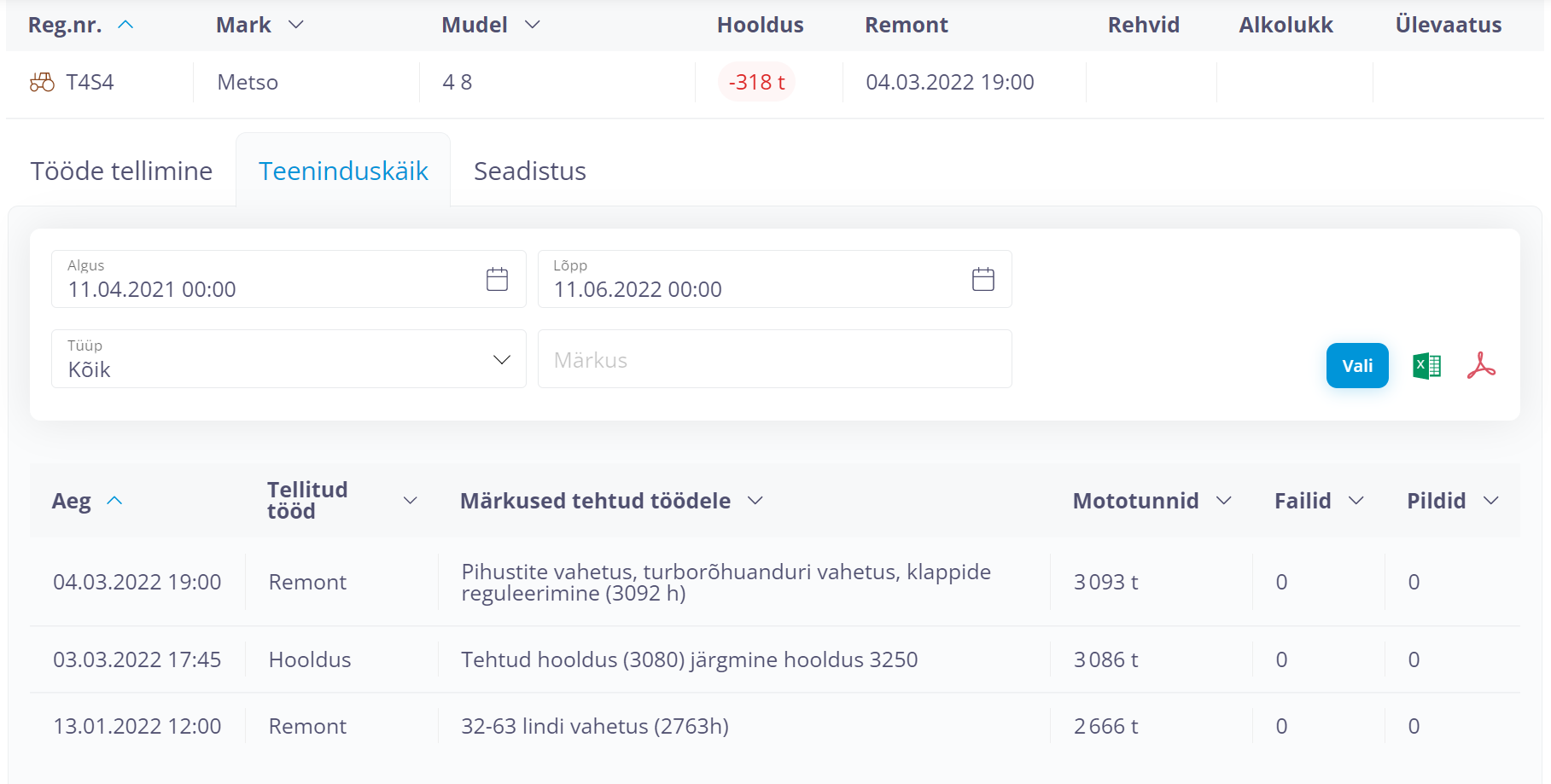
Hooldamistest jääb ühte kohta maha kogu teenindusalane dokumentatsioon – pildid, arved, pakkumised. Need on süstematiseeritud kujul. Lihtne otsida ja kiire leida. Vajadusel mugav järele vaadata, mis ajal missuguse odomeetri või töötunni näidu juures mingi remont või hooldus teostati. Kasulik edaspidi ka masina müümisel.
Täpse sihtkoha ja konkreetsete juhistega varustatud ülesanne on esmaoluline asi. Alles seejärel saab rääkida täitmisest ning täitmise operatiivsusest. Metroteci ülesannete rakendus seob omavahel autojuhi, logistiku, kliendi ja hea tahtmise korral raamatupidamistarkvara. Püstitatud ja seejärel täidetud ülesannetest formeerub aruanne, mille põhjal on mugav ja lithne esitada arveid kohaletoimetatud kauba või osutatud teenuse eest.
Autojuht näeb enda vaates temale omistatud ülesandeid koos konkreetsete sihtkohtade, planeeritud marsruudi ning töö täitmiseks vajalike juhistega. Teenuse osutamise täitmise kinnituseks võtab juht tellijalt elektroonilise allkirja. Samuti on juhil võimalus lisada omapoolseid fotosid või kommentaare, kui kauba kohaletoimetamine või teenuse osutamine mingil põhjusel võimatuks peaks osutuma.
Vajadusel saab logistik määrata täpse juurdesõidutee, minimeerides selliselt sihtkoha leidmiseks kuluva aja. Kliente on erinevaid ning sellest tingituna on ka rakendusest mitmeid variante, mis erinevalt käsitlevad töö püstitust, läbitavate vahepunktide hulka ja hilisemat araunnet töö täitmise kohta.

Betoonitootjal on omaenda tellimuste register. Selle põhjal toimub betooni müük, arveldus laialiveo ja mahalaadimise eest. Puuduseks on suur hulk paberimajandust ja käsitsi sisseviidavad ajamomendid. Konkurents nõuab, et veo-, mahalaadimis- ja pesuajad oleksid täpselt arvestatud. Vedajatena on protsessi kaasatud allhankijad, kellega samuti tuleb arveldada kohaleveo ning mahalaadimiste osas. Operatiivsus, täpsus ja läbipaistvus on märksõnad. Vastasel juhul kulub aeg vaidlemisele ja usaldamatuses kannatab koostöö. Kontrollimine on vajalik, aga tülikas ja aeganõudev mõlemale poolele. Omakorda soovib tellija sirvida onlines oma tellimuste ajalugu ning täitmise käiku. Samavõrd on ta huvitatud tarneprotsessi läbinähtavusest.
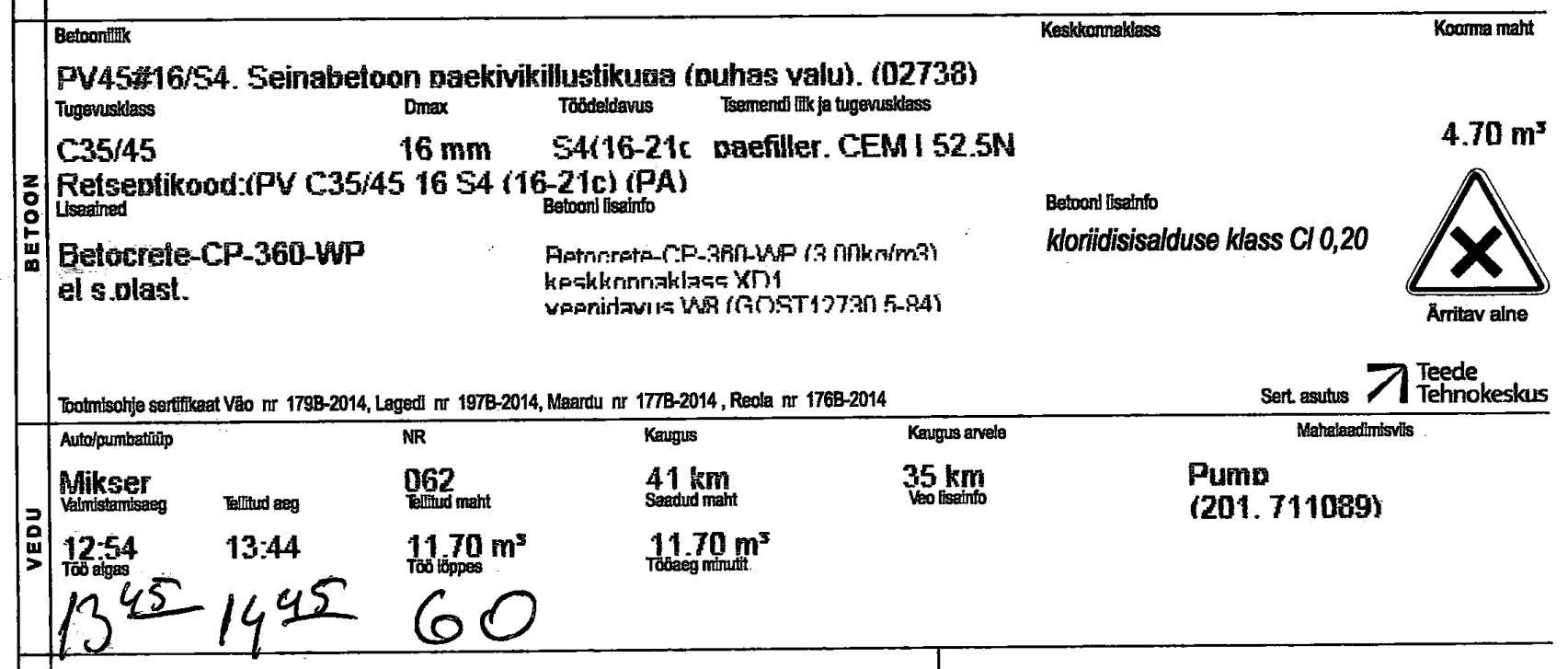
Tellimused betooni kohaletoimetamisele ja mahalaadimisele edastakse paralleelselt Metrotec’i. Metrotec’is formeeritakse sellest ülesanne autojuhile. Tahvelarvuti ekraanilt näeb autojuht sihtkohta, teed selleni ja tellimuse täitmiseks vajalikku lisainfot. Vajadusel on juhil võimalus lisada tellimusele omapoolselt infot kas mahalaadimise meetodi või tema poolt betoonile lisatud ainete osas. Samuti saab juht võtta tellimuse täitmise kinnituseks kliendilt allkirja puutetundlikule ekraanile.
Ei ole enam juhil tarvidust käsitsi märkida saatelehele kohalejõudmise- ja lahkumise aegu. Selle teeb autojuhi eest ära süsteem. Muuhulgas tagastatakse kõnealused ajamomendid automaatselt betoonitootja enda tellimuste süsteemi. Töö täitmisest formeerub aruanne, mis kajastab täpselt mahalaadimiste kestuseid.
Kaubasaadetise või mistahes objekti varustamine märkamatu GPS-seadmega vähendab riski, et see jäljetult kaduma läheb. Kadunud asju pole enam olemas, sest väike vidin suudab nende asukoha omanikule alati teatavaks teha.
Kindlustus ei pruugi hüvitada kogu summat, mida omanik eeldab oma vara väärt olevat, kaugjälgimisega kaitstud vara võib aga tõenäoliselt tervelt tagasi saada. On teatav liik varasid, näiteks tööriistad, treilerid vms, mille kindlustamisel puudub mõte, kuid mil on omanikule oluline funktsionaalne väärtus. Varastatud seadme tõttu seiskub töö, jääb saamata teenistus vms. Reliikviate laadsed varad evivad omanikule emotsionaalset väärtust, mida rahas ei saa väljendada. Kõiki nimetatud asju saab varustada jälgimisseadmega.
Tehnika rentimisel või lihtsalt asjade väljalaenamisel tuleb ette, et neid ei tagastata õigeaegselt. Juhtub sedagi, et need hoopistükkis tagasi toomata jäävad. Jälgimisseadmega rendimasina asukoht on 100% teada. Kui hoolikas peremees kasutab tehnoloogia võimalusi ja tegutseb operatiivselt, saab ta endale kuuluvad asjad kiiresti oma valdusesse tagasi.
Träkkimisest olnuks kasu kevadel avalikkuses laineid löönud juhtumi puhul, kui Briti saartel haihtusid Eestist teele pandud nelja vineerikoorma jäljed. Koormalt regulaarselt signaale saades olnuks reaalne võimalus pärast pettuse ilmsikstulekut tuvastada vähemalt seda, kus asuvad koormas olnud alused. See olnuks juba käegakatsutav jälg, mida politseil kontrollida. Praegu aga laiutavad kõik osapooled käsi ja kaubast ilma jäänud ettevõte peab 75 000 eurot kortsnasse kirjutama.
Tegelikult saanuks kauba teadmata suunas haihtumist ära hoida, kui selle küljes olnuks S-Track seade
Loe artiklitLäänemaalt pandi ühe Tallinnas tööl käiva mehe maakodu hoovilt pihta tuliuus traktor Valtra koos metsatõstukiga, sõideti sellega poolsada kilomeetrit eemale ning üritati althõlma poolmuidu maha parseldada. Et traktor koduõuel ei seisa, sai omanik teada mitu päeva hiljem ja seda inimeselt, kellele varastatud tehnikat müüa pakuti.
Olnuks traktorile paigaldatud jälgimisseade, saanuks omanik kohe teavitatud, kui see koduõuelt minema sõitis
Loe artiklitOluline väärtus varade jälgimisel on operatiivsel teavitusel, kui jälgitav objekt mingisse sihtkohta jõuab või tema tehnoseisund näiteks pardapinge langemise või aku tühjenemise läbi halveneb. Mootorrataste, ATV-de, lumesaanide puhul on jälgimisseadme abil tehniliselt võimalik mootor sundseisata ja juhtida blokeeringut nutitelefonilt. Paatidel saab mõõta pilsivee taset või saada alarmeeritud kui suitsuandur signaali peaks väljastama.
Personaalse jälgimisseadmega saad omaenda paiknemise nähtavaks teha lähedastele või vastupidi. Äsjase koolilapse asukoht on 100% teada. Lihtne on luua piirkonnad, millest väljudes saad koheselt teate.
Träkker võib olla elukindlustuseks purjetajale või kalastajale. Hobidega tegeldakse iga ilmaga, kuid ilm võib salakavalalt ära pöörata ja inimene seeläbi hätta sattuda. On hea, kui lihtsa nupuvajutusega saab edastada hädaabi kutsungi piirivalvekordonisse, sadamavahile või ürituse korraldajale.
Träkkerid on erinevad ning kasutusalast lähtuvalt on otstarbekas välja valida kord üks, kord teine. Olulise tähtsusega pakutavate seadmete juures on võimalikult väikesed mõõdud, väike voolutarve, niiskus- ja isegi veekindlus.
X-Track – kui live info on kõige olulisem ning jälgitaval objektil on olemas oma püsitoide või kui soovitakse kaugseisata mootorit või juhtida blokeeringut.

P-Track – kui inimese või looma jälgimine on kõige olulisem.

S-Track – kui kõige määravam on pikk toimivusaeg ja seadme olemasolu keerukas tuvastamine.

Kõiki neid tooteid ühendavaks ühiseks jooneks on vastupidavus vintsutamisele keerulistes oludes.
Varade jälgimisega saad luua endale lihtsa süsteemi, millega hoida silma peal iseendal, oma asjadel ning vajadusel lähedastel.
Laialdaselt on kasutusel geoalarm. Omanik saab operatiivselt informeeritud, kui keegi või midagi teatavast alast lahkub või kindlasse kohta kohale jõuab.
Äravedamisalarm leiab kasutamist mootorratastel, ATV-del, lumesaanidel ja analoogsetel nii öelda kergetel masinatel ning see rakendub siis, kui tehnikat näiteks treileril ära vedada üritatakse.
Algajaid autojuhte distsiplineerib teadmine, et ollakse kellegi valvsa pilgu all. Nii on vähem muret juhtudel, kui kokkulepitud ajal kokkulepitud kohta ei jõuta ning sinu kõnedele ei vastata.
Mitmetesse jälgimisseadmesse on sisse ehitatud termomeeter. Neil puhkudel näeb kasutaja temperatuuri logi või saab soovi korral alarmeeritud temperatuuri tõusmisest/langemisest tema poolt määratud piirini.
1. Kampaanias on võimalik osaleda 10.10-01.11.2017.
2. Kampaania perioodil on teenuse kuutasu uutele liitujatele 5€ .*
3. Teenuse kuutasu sisaldab OBD-seadme Teltonika FMB 010 renti, GSM andmeside ja veebiteenuse kasutamisõigust.
5. Teenuse kasutamise lõpetamise korral tuleb töökorras seade tagastada, või osta välja hinnaga 99€.
* Hinnale lisandub käibemaks.
1. Kampaanias on võimalik osaleda 10.10-01.11.2017.
2. Kampaania perioodil on Teltonika FMB 010 hind Metroteci klientidele 50€.
Õigeaegse ja täpse info olemasolu on mistahes juhtimise möödapääsmatuks eeltingimuseks. Vana kooli mehed leiavad, et alati võib kellegi või millegi asukoha teadasaamiseks lihtsalt helistada. Absoluutselt õige! Aga kui telefon on kinni või väljalülitatud või leviulatusest väljas või kutsele mingil põhjusel ei vastata või vallandub vastuses nutulaul? Tuttav tunne, kas pole?
Mida aeg edasi seda akuutsemaks pidev teabevajadus muutub. Krooniline järelepärimine on ülimalt tüütav ja isegi ahistav tegevus mõlemale poolele. Kasuta parem GPS kaugjälgimist. Lihtne ja mugav, säästab aega ning närve. Masinale paigaldatud GPS seade teab alati masina täpset asukohta, on alati sisselülitatud ja edastab infot perioodiliselt positisoneerimissüsteemi andmebaasi. Sellega on sul alati vajalik teave käepärast just siis, kui sina seda vajad ja sa ei sõltu kunagi kellestki teisest.
Täpselt nii nagu finantsjuht saab edasiste majandusotsuste tarbeks lähteinfo firma raamatupidamisest, tarbib logistik või tehnikajuht positsioneerimissüsteemist pidevalt värsket asukohainfot masinate töö koordineerimiseks.
Ainuüksi teadmine, et „olen kaugelt nähtav“ on distsiplineeriv. See teadmine kujundab suhtumist ajakasutusse tööajal, mis omakorda aitab vältida hilisemaid vaidlusi, vähendab tühisõitude hulka ja muudab kogu tööprotsessi läbinähtavamaks.
Positsioneerimissüsteem pole mõeldud „viilijate“ avastamiseks, vaid eeskätt teadmatusest, vähesest informeeritusest või planeerimisest tehtud vigade avastamiseks.
Kui asukohainfo koos sõiduajalooga on olemas, saab tööd paremini korraldada nii töötaja kui autojuhtide seisukohast lähtuvalt. Sujuv töökorraldus parandab ettevõtte sisekliimat, tõstab töötajate usaldust juhtkonna vastu ning suurendab produktiivsust.
Andmeajalugu tõdeb erapooletult, kas näiteks oldi kokkulepitud ajal kokkulepitud kohas või kas mingi sõidu- või paiknemisfakt leidis aset või mitte. Andmeajaloo hilisem läbimängimine võimaldab hinnata sõitmiste optimaalsust ning teha olulisi parendusi tuleviku tarbeks.
Kaugjälgimine aitab töid operatiivselt juhtida ja vajadusel sekkuda. Olgu siis tegemist ekipaaži õigesse sihtkohta juhatamise või ootamatult esile kerkinud lisaülesande lahendamisega. Peaaegu alati on võimalik kaugjälgimise abil hinnata sihtkohta jõudmise aega ning selle järgi planeerida edasisi tegevusi. Kindlasti aitab asukoha teadmine täpsemaid otsuseid teha, mille lõpptulemuseks on säästetud aeg ja raha ning kõrgem turvalisus.
Oma varal tuleb silm peal hoida. Päeva alustamine renditehnika positsioneerimisega on justkui kohustuslik saiake hommikukohvi kõrvale. Esmaoluline on, et kogu tehnika hetkemomendi seisuga ikka omas õiges asukohas oleks.
Kaugjälgimine lõpetab pidevad tülikad järelepärimised autojuhile, kus ta asub. Vähem stressi ja närveerimist ühelt poolt ning pideva sekkumise kadumine teiselt poolt on kasulik kõigile, samal ajal kui töödest on pidevalt ülevaade olemas.
Kindlasti peab varasematest kaugjälgimise kasutamise kogemustest paika väide, et ettevõte võidab positsioneerimise kasutamisest vähemalt 10 minutit päevas, mis teeb ligikaudu 100 eurot kuus, kui tunni maksumuseks võtta 25 eurot.
Paigalduskeerukus sõltub seadmest. Kõige lihtsam seade on pisut suurem tikutoosist ning ettenähtud ühendamiseks sõiduki diagnostika pesasse. Selle paigaldamine on võrreldav pistiku seinakontakti torkamisega, millega igaüks kõrvalise abita hakkama saab.
Olles peale paigaldamist sõlminud positsioneerimisteenuse pakkujaga lepingu, saab süsteemi kasutama hakata kohe.
Jälgimisseadmest serverisse saabuva info põhjal formeeritakse liikumiskiiruste, läbisõitude, sõidu- ja seisuaegade aruanded.
Heaks võimaluseks on alade mahamärkimine kaardile ning nende külastusaruannete koostamine. Seadme saab panna registreerima temperatuure, kütusejääki paagis, mootori pöördeid, luukide avatust, samuti ka tõsteseadme, vintsi või mõne muu olulise lisasüsteemi rakendatust. Koos asukohainfoga edastab seade sel juhul serverisse ka kõigi külge ühendatud andurite näidud.
Omaette teemad on masinate broneerimine, juhtide tuvastmine, tööaja arvestus väljaspool kontorit, digitahhograafi failide allalaadimine, kahepoolne side autojuhiga, kaugjälgimissüsteemi poolt kogutud andmete ning nendel põhinevate tuletiste automaatne edastamine kliendi infosüsteemi ja palju muud. Kasu kliendile on seda suurem, mida rohkem lisavõimalusi ära kasutatakse.
Teadupärast põhineb rasketehnika käitlus ja hooldamine mototundidel. Tehnikaühiku töövõimekust ja üldist seisukorda hinnatakse äratöötatud mototundide põhjal. Keskmist kütusekulu väljendatakse liitrites mototunni kohta.

Kuidas aga registreeritakse mototundide näidud, missuguse perioodilisusega need tehnikajuhini jõuvad, mil moel neid edasi töödeldakse? Kas sa saad öelda, et omad masina tööprotsessist ülevaadet selliselt, et suudad vajadusel taaselustada mingi suvalise hetke või lõigu varasemast perioodist?
See on aga oluline, kuna detailide teadmine võimaldab tagantjärele situatsiooni täpselt mõista ja lahendada mistahes vaidlusi.
Teadmine, et näiteks ühe kuulisel aruandeprioodil tiksus täis N tundi, ei sisalda endas informatsiooni töötatud tundide otstarbekuse osas. Kuid just see on oluline kuluefektiivseks majandamiseks.
Kasuta kaugjälgimist! Kaugjälgimissüsteem registreerib perioodililiselt masina tööoleku, teab igal ajahetkel selle mototundide näitu ja veelgi enam – omab ka teadmist, kas mootor töötab tühikäigul või intensiivselt.
Nii on sul võimalusi lahendada tüliküsimusi, ennetada probleeme. Lisaks on sul alati käepärast täpsed aruanded ning just sel momendil, kui sina neid kõige enam vajad. Kaugjälgimise kasutamisega lihtsustad tehnika majandamist, muudad selle enda jaoks korrapäraseks ja võidad aega.
Kellelegi pole uudiseks, et sisuliselt igas valdkonnas on konkurents tihe ja kasumi teenimine seetõttu keeruline. Olukorras, kus tulusid ei õnnestu kiirelt suurendada, tuleb kulusid paremini kontrolli all hoida. Rasketehnika puhul on suurteks kuluartikliteks kütus ja masina amortisatsioon. Kaugjälgimise läbi on sul efektiivselt kontrolli alla iga ärakulutuatud kütuseliiter ning iga äratöötatud minut.
„Metroteci veebis näen ära kõik tühikäigul töötamise seisutunnid ja intensiivselt tehtud töötunnid. Kõiki masinaid on võimalik ka GPS-seadme abil täpselt positsioneerida ja nii saan objektil toimuvast väga selge ülevaate,“ selgitab kopafirma omanik, kuidas sellisest lahendusest on tema jaoks kasu olnud.
Mootori pöörete registreerimise läbi saab mõista, mida töötundide vältel tehti ja kas kõik oli ikka otstarbekohane. Ei ole enam selliselt, et masin jäetakse tiksuma, sel ajal kui juht omi asju ajab.
Tühikäigu aruanne toob selgelt esile kasutult ärakulutatud kütuse ja hooldevälba „lähendamise“ aja. Tavapäraselt mõeldakse tehnika soetamisel ka selle edasisele müümisele. Äramärkimist väärib, et tüüpiline 20-protsendiline jõudeaeg kahandab automaatselt hilisemat müügiväärtust ning et kaugkontrolli läbi saab tehnika kõrgemat müügiväärtust hoida.
Oma varal tuleb silm peal hoida. Päeva alustamine renditehnika positsioneerimisega on justkui kohustuslik saiake hommikukohvi kõrvale. Esmaoluline on, et kogu tehnika hetkemomendi seisuga ikka omas õiges asukohas oleks.
Aruandeid on paratamatult tarvis. Aruannetel põhineb tööaja-, palga- ja kuluarvestus. Kas oled arvestanud, kui palju tüli teeb andmete igakuine kokkuajamine rääkimata ajakulust numbrite sisestamisel? Ning kui sisestamisel juhtub läbi minema viga?! Kaugjälgimissüsteem registreerib töötsüklite algused ja lõpud sekundilise täpsusega ning ei eksi kunagi numbrite liitmisel ega lahutamisel. Sul pole endal enam tarvis sellele aega pühendada või kedagi teist tagant torkida. Aruanded on alati käepärast just siis, kui sinul neid parasjagu tarvis on.
Tuttav tuleb ette olukord, kus tellija soovib teatavale tööle täpset maksumust, kuid tööde mahtu täpselt määrata on keeruline. Kaugjälgimine mõõdab ärakulutatud aega veatult ja võimaldab soovi korral protsessist läbinähtavuse ka tellijale. Täpsus iseloomustab täitja professionaalust. Tellija märkab ja väärtustab seda. Sul on alati võimalik tagantjärele kontrollida, mis ajal midagi toimus, oli see siis töö algus, lõpp, seisak või midagi muud ning igasugused vaidlused lahenevad seeläbi operatiivselt ja kiretult.
Hooldusvälpadest kinnipidamine on iga masina hea vastupidavuse eeltingimus. Elu on näidanud, et välba ignoreerimine on tinginud hilisemaid suuri remondikulusid ning viinud isegi tehasegarantii katkemiseni. Masinate hoolduse õigel ajal tegematajätmine võib viia tuhandetesse eurodesse ulatuvate kahjudeni.
Välpade arvestust võib pidada Excelis ja paljud rasketehnika omanikud selliselt ka toimivad. Igaüks saab aru, et käsitsi sisestamine tähendab vigu rääkimata selle pideva tüütu tegevuse aeganõudvusest ning tulemuseks on tegemata tehnohooldus.
Äratuskellaga sarnaselt toimib kaugjälgimissüsteem, mis sinu poolt seadistatud välpade lähenemisel vastutavaid isikuid teavitab. Süsteem peab pidevat arvestust, teenib sind truult 24/7 ja ei unusta kuangi midagi ega kedagi.
Muidugi võib töötunde ka Excelis arvestada, paljud rasketehnika omanikud teevadki seda. See pole aga alati kõige täpsem ja kindlam.
Näiteks ainult Exceli tabelit täites võivad töötajad kergesti eksida ja hoolduste meeldetuletused jäävad märkamata. Lisaks tähendab käsitsi arvepidamine töötatud mototundide kohta tüütut ja aeganõudvat andmesisestust.
Ainüksi tühikäigu kontrollimine ja selle vähendamine 10% võrra tähendab tehnikaühikule 10% võrra kõrgemat jääkväärtust (mitmed tuhanded eurod). Ajaline võit aruannete koostamiseks kulunud aja või aruannete koostamise eesmärgil teiste inimeste sundimisele kulunud aja läbi on 2-3 tundi (100 eurot) kuus ühe tehnikaühiku kohta. Kütusekulu kokkuhoid tühikäigul töötamise vähendamise arvelt on 25eurot kuus. Rahaliselt on keeruline väljendada kasu, mis tuleneb õigeaegsetest hooldevälpadest, täpsetest aruannetest, ennetatud probleemidest ja lahendatud vaidlustest.
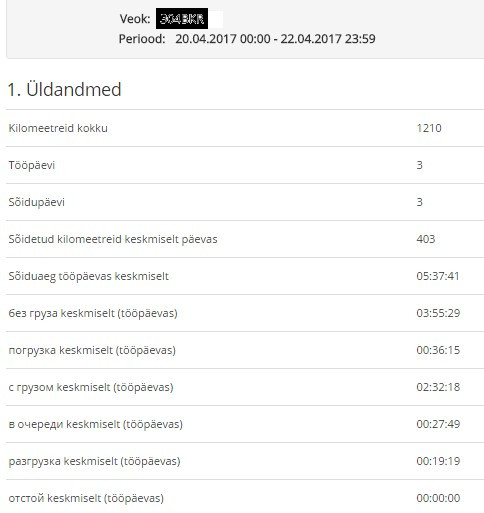
Efektiivsuse suurendamise eeltegevusena on ikka soovitatud täpset mõõtmist ja analüüsi. Esmalt jagame töö- või teenindusprotsessi olekuteks. Jagamine ja olekute nimetamine, samuti ka erinevate olekute hulk on individuaalne.Oluline on üleminekumomentide täpne registreerimine, milleks sobib kontrolleri külge lisaseadmena ühendatav klaviatuur.
Tööolekute kestuste mõõtmine võimaldab üsna hästi mõista, mille peale aeg ära kulus. Lisaks kestusele on iga olekuga seotud mahasõidetud kilomeetrid, tarbitud kütus ning kaarditugi. Mõõdetud tulemustel saab hinnata protsessi efektiivsust, kujundada teenuse hinda, töötada välja motiveerivat palgasüsteemi, võtta registreeritud olekud aluseks tööpäevikule. Tekkinud andmeid võib kasutada sisendina protsessi analüüsil, mille väljundiks on otsused ajakasutuse parendamiseks.
Ehitusettevõtja on materjali veoprotsessi jaganud järgmiselt: sõit koormaga ning ilma, peale – ja mahalaadimine, seisak järjekorras, puhkeaeg.
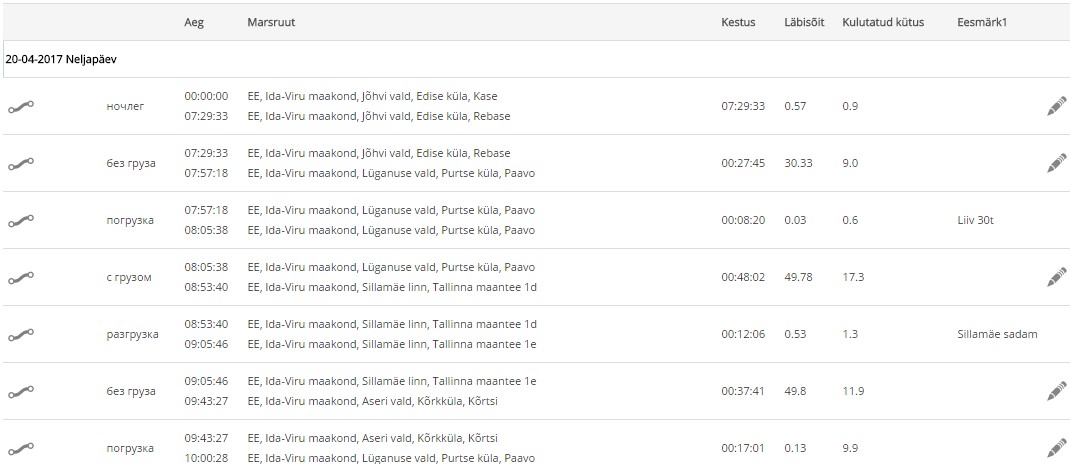
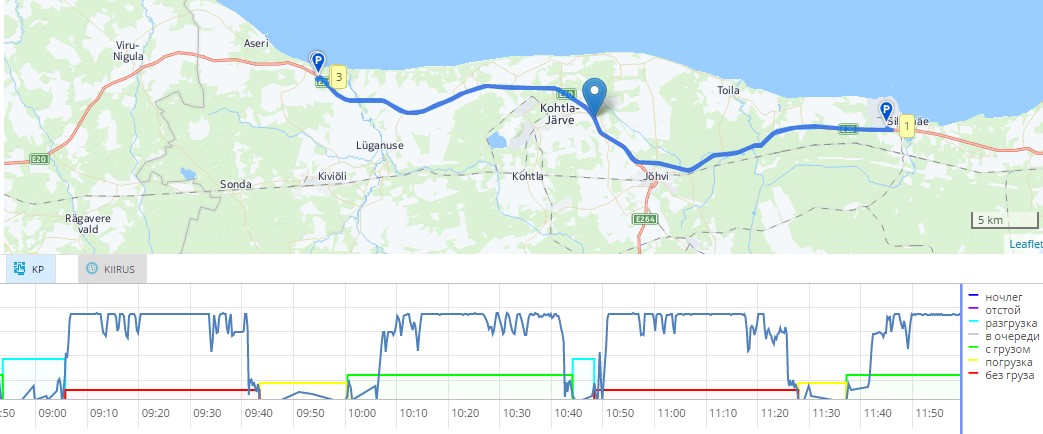
Tööolekute kaarditoega andmeajalugu toob erinevad olekud ilmekalt esile. Selgelt on arusaadav, millal ja kus mingi olek muutus ning kaua see kestis. Kui ilmnes seisak, siis andmeajalugu seda ka näitab.
Aruanne esitab vaadeldava perioodi kohta tööolekute keskmised kestused päevas võimaldades sellega omanikul hetkega hinnata efektiivsust.
Iga oleku kohta on aruandel eraldi rida, mida kasutaja saab täiendada oma andmetega. Lisades sobivatele ridadele info tellija, osutatud teenuse või kohaletoimetatud kauba kohta muutub aruanne päevikuks ja kujutab endast sisendit arveprogrammile. Mitte ükski rida ei jää vaatluse alt välja, iga sent saab toodud koju.
Järeltöötluse eesmärgil saab tööolekute aruannet eksportida kliendi enda majandustarkvarasse. Vaata ka artiklit “Andmete laadimine ühest süsteemist teise“
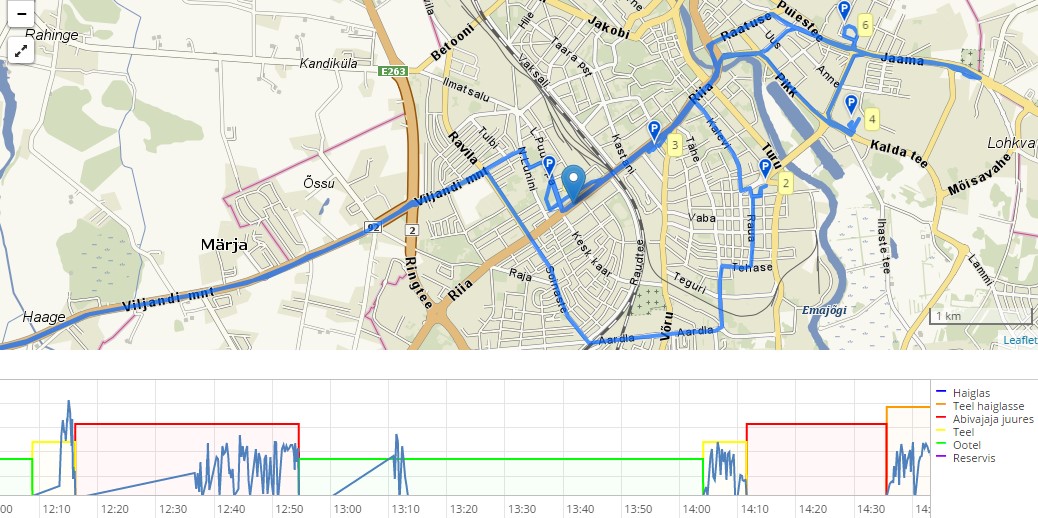
Kiirabi kasutab tööolekuid väljakutsete teenindamise analüüsimiseks.
Olekud on kiirabi määranud järgmiselt: kutse ootel, teel patsiendi poole, abivajaja juures, teel haiglasse, haiglas, hoolduses ja reservis.
Teenindamise lähtekohaks on häirekeskuse poolt vastuvõetud hädaabikõnes fikseeritud teenindusnõude ajamoment. Esmase asjana on tähtis täpselt mõõta väljakutsele reageerimise ning kohalejõudmise aega. Tööolekutes need registreeritakse.
Teenindamine mängitakse hiljem uuesti kriitiliselt läbi ja analüüsitakse ühiselt operatiivsust. See rutiin toimub pidevalt, noritakse iga viivituse kallal ning sellise järjepidevusega tagatakse parem valmisolek ja lühemad teenindusajad.
Lisaks on teenindava brigaadi tööolek kaardil erinevat värvi punkti kujul dispetšerile reaalajas nähtav.
Vedelkütuse vedaja on huvitatud, et kütuse mahalaadimised tanklates toimuksid võimalikult kiiresti.
Samuti on tähtis, et mahalaadimiste kohti ja ajamomente oleks lihtne kontrollida. Klaviatuuri siinkohal ei kasutata, kuid kontrolleri sisenditesse ühendatakse signaalid, mis näitavad laadimispumba sisselülitatust ning haagise küljeluukide avatust. Hiireklikiga aruandereal on logistikul hõlbus vaadata, kas pumba töötsükkel (ehk mahalaadimiskoht) langeb kokku tellija asukohaga. Aruanded pumba tööd ja küljeluukide lahtiolekut kajastavate sündmuste osas liiguvad automaatselt kliendi majandustarkvarasse ning seal toimub võrdlus tellimuste süsteemis ettenähtud laadmisaegadega. Selle tulemusena filtreeruvad välja sündmused, mis etteantud ajaraamidesse ei mahu. Operatiivsete mahalaadimiste arvelt on seisuajad lühemad ning see omakorda tähendab suuremat veojõudlust ja suuremat tulu nii ettevõttele kui ka kõrgemat töötasu autojuhile.
Saematerjali vedaja jaoks on esmatähtis teenindada võimalikult palju kliente ühe päeva jooksul.
Lisaks sõiduks kuluvale ajale on oluline aru saada, kui kiirelt toimub kauba peale- ja mahalaadimine masinal paikneva kraanaga ning kui suure osa moodustab laadimisprotsess objektil viibitud ajast. Paigalseisul tehtava töö mõõtmiseks on seadmesse ühendatud hüdropumba ja kraana signaalid. Seade registreerib pedantse järjekindlusega mõlema mehanismi tööolekute muutumised. Aruanne toob selgelt esile perioodid, mil hüdropump koormuseta töötamisel põhjuseta vananeb. Õigeagne sekkumine pikendab eluiga. Kraana töö on ajakriitiline. Kui see aruannete põhjal osutub liiga pikaks, siis käsitletakse juhtumit eraldi ning vajadusel viiakse tööprotsessis sisse muudatusi, mille tulemuseks on lühem laadimisaeg ning üldine suurem teenindusjõudlus. Kaarditugi võimaldab kontrollida, kas mahalaadimine toimus õigel aadressil ja/või kliendiga kokkulepitud ajal.
Seisev auto on kulu, alakasutatud auto on luksus.
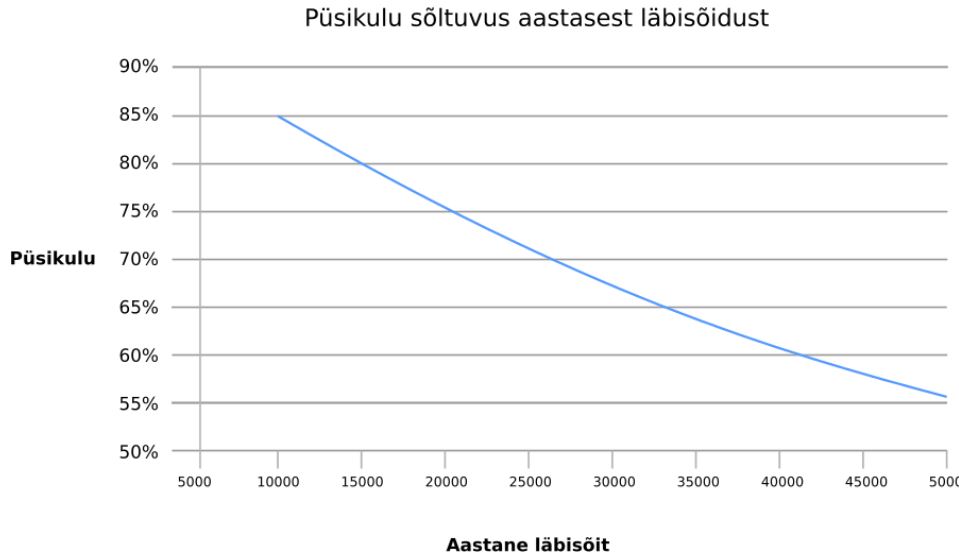
Mida vähem auto sõidab, seda suuremat kuluartiklit see endast kujutab. Pealtnäha uskumatu paradoks, kuid selliselt see on – paigalseis tulu ei tooda! Aastas 10 000km sõitev liisingauto tähendab ettvõttele 6700 eurost kulu. Kusjuures läbisõidust sõltumatu püsikulu moodustab sellest 85%.
| Läbisõit aastas (km) | 50000 | 40000 | 30000 | 20000 | 15000 | 10000 |
| Läbisõidust tulenevad kulud | ||||||
| Autokütus (6l/100km, 1.05€ / l) | 3150 | 2520 | 1890 | 1260 | 945 | 630 |
| Tehnohooldus (300€ / kord) | 1000 | 800 | 600 | 400 | 300 | 300 |
| Rehvid (400€ / jooks, jooks 50000km) | 400 | 320 | 240 | 160 | 120 | 80 |
| Püsikulud | ||||||
| Rehvivahetus (40€ / kord) | 80 | 80 | 80 | 80 | 80 | 80 |
| Liikluskindlustus (11€ / kuu) | 132 | 132 | 132 | 132 | 132 | 132 |
| Kasko (35€ / kuu) | 420 | 420 | 420 | 420 | 420 | 420 |
| Autopesu (35€ / kuu) | 420 | 420 | 420 | 420 | 420 | 420 |
| Parkimine (12€ / kuu) | 144 | 144 | 144 | 144 | 144 | 144 |
| Erisoodustus (75€ / kuu) | 900 | 900 | 900 | 900 | 900 | 900 |
| Kasutusrent (300€ / kuu) | 3600 | 3600 | 3600 | 3600 | 3600 | 3600 |
| Kulud autole aastas kokku | 10246 | 9336 | 8426 | 7516 | 7061 | 6706 |
| Sellest püsikulu | 5696 | 5696 | 5696 | 5696 | 5696 | 5696 |
| Püsikulu osa kogukulust | 55,6% | 61,0% | 67,6% | 75,8% | 80,7% | 84,9% |
Mida väiksem on läbisõit seda suurem on püsikulu protsent. Kulunumbreid vaadates tekib kohe küsimus, et kas ikka kõik autod ettevõttes on vajalikud? Igaüks on huvitatud kulude piiramisest, kui see ei too kaasa langust pakutava toote või osutatava teenuse kvaliteedis.
Võttes arvesse sõitmiste arvu päevas, sõidu- ja seisuaega, sõitmiste ja seismiste geograafiat, saab hinnata sõiduki efektiivset kasutusaega. Hea võimalus efektiivse kasutusaja suurendamiseks on alakasutatud masinatele ühiskasutuse kehtestamine. Ning võib selguda tõsiasi, et ettevõtte iga viies või isegi neljas sõiduk on üleliigne. Mis rahas tähendab aastas 6000+ € kokkuhoidu. Summa, mille kokkuhoiu nimel tasub tegutseda, eks?
Ühiskasutuse kehtestamiseks on kindlasti vajalik broneerimissüsteem, mis on GPS kaugjälgimise üheks mooduliks.
GPS kaugjälgimise hind koosneb neljast komponendist:
 Sõltumata sellest, kas tegemist on rendi või seadmete väljaostuga, on paigaldus alati omaette kulu. Kui seda rendi puhul eraldi välja pole toodud, tuleb hoolikalt lugeda kas rendilepingut või teenuse üldtingimusi. Sellest, kas osta või rentida, tuleb juttu allpool. Vaatleme hinnakomponente eraldi …
Sõltumata sellest, kas tegemist on rendi või seadmete väljaostuga, on paigaldus alati omaette kulu. Kui seda rendi puhul eraldi välja pole toodud, tuleb hoolikalt lugeda kas rendilepingut või teenuse üldtingimusi. Sellest, kas osta või rentida, tuleb juttu allpool. Vaatleme hinnakomponente eraldi …
Ilmselt on kõige lihtsam vastus, et hind on võrdne paigalduse keerukusega. Võttes näiteks kliendi, kes soovib ainult asukoha jälgimist, siis selline enimalt tunniga tehtav paigaldus on kõige madalama hinnaga. Siin on tehnikul tarvis leida sobiv paigalduskoht seadmele ja antennidele, ühendada toide ning süütesignaal.
Järgmine keerukustase on kütusekulu mõõtmine. Tulenevalt kliendi soovist ning masina tüübist on siin vaadeldavad mitu varianti.
Sõiduautodel ja kaubikutel on otstarbekas kütuseinfo võtta CAN busilt. CAN ühendusega paigalduse teostamisele kulub keskeltläbi 1.5 tundi. Lisaks kütusetasemele saab CAN busilt näiteks ka mootori pöörded ja muud kasulikku infot. Erinevatel masinatüüpidel on ühenduskohad erinevad ning tehnikul peavad olema piisavad eelteadmised.
Ehkki ka veomasinatel kasutatakse kütusekulu kontrollimiseks sageli CAN-bus andmeid, annavad tunduvalt täpsema tulemuse autonoomsed nivooandurid. Jälgimisseadmega ühendatavad kütuseandurid on populaarsed ning leidnud laialdast kasutust raskeveokitel, ehitustehnikal, karjääritehnikal, põllumajandusmasinatel või mõnel muul eritehnikal seal hulgas ka veduritel.
Kütuseanduri paigaldamine tähendab anduri paaki monteerimist, ühenduskaabli vedamist seadmeni, juhtmete ühendamist ning anduri kalibreerimist. Keskmine ajakulu andurite paigaldusele on 3-, 4- või 5 tundi vastavalt sellele, kas tegemist on 1-, 2- või 3-paagilise masinaga. Andurite paigaldust võivad pikendada ning kallimaks muuta segavad asjaolud, kui lisatööna tuleb näiteks eemaldada segavaid katteid või vajab mahamonteerimist isegi kütusepaak.
Sagedasti esineb olukordi, kui klient soovib paigaldada juhituvastussüsteemi, alarmi, mingit lisaandurit, või soovib siis jälgida erinevate pardasüsteemide (kraana, webasto jne) tööd. Neil puhkudel hindame täiendava töömahu eraldi.
Kokkuvõtvalt võib öelda, et paigalduse maksumus põhineb ajakulul töö teostamisele ja sõltub paigaldatavate sõlmede hulgast ning komplitseeritusest. Paigalduse maksumuse toome alati eraldi välja hinnapakkumises .
Seadmete hind kliendile sõltub puhtalt kliendi soovidest. Siin on oluline, et missugust funktsionaalsust seadmelt nõutakse või mis otstarbel seadet rakendatakse. Jämedalt võib hindade põhjal seadmekomplekte grupeerida järgmiselt:
Arvestades, et seadmekomplektidesse saab lisada erinevad lüliteid ning andureid, termomeetreid, mootori pöörete lugejaid, RFID lugejaid, klaviatuure tööolekute registreerimiseks jne, muutub erinevate kombinatsioonide hulk päris suureks.
Seadmekomplektis on kõige tähtsam komponent kontroller. Kontrollerid erinevad ükseteisest omaduste, hinna ja võimekuse poolest. Ka kõige võimekamat kontrollerit, mille külge saab ühendada suure hulga lisasid, võib kasutad ainult positsioneerimiseks, kuid kindlasti pole see optimaalne.
Isegi siis, kui eesmärgiks on madal hind, tasub pisut aega kulutada ja mõelda, kas edaspidi võiks perspektiivi olla näiteks mootori pöörete mõõtmisel või mingil teisel kasulikul omadusel. Tuleb arvestada, et kõikide kontrolleritega ei pruugi väga mitmed lisad hiljem võimalikud olla.
Nüansse on üsna palju ning seetõttu ei soovita me klientidel kunagi küsida pimesi pakkumist eelnevalt süsteemi nägemata või nende võimalustega tutvumata.
Otsesõnu vastates saab klient kuutasu eest eeskujulikult toimiva teenuse koos tehnilise toe ja pidevate edasiarendustega. Samuti on kuutasu sisse arvestatud SIM kaardi kulu. Kaugjälgimisteenuset osutamine tähendab teenuse pakkujale märkimisväärset vastutust. Teenuse kägushoidmine nõuab pidevat tööd ja ressurssi. Märksõnad, mida tuleks arvestada kuutasu olemuse mõistmisel, on järgmised:
Teenuse kuumaks sõltub kliendile aktiveeritud tarkvaramoodulitest. Tavapärase positsioneerimise ja kütuseseire kõrval leiavad rakendamist veel broneerimine, ruuting, kahepoolne side autojuhtidega, sõidumeerikult failide kopeerimine, andmeintegratsioon, tööülesannete etteandmine, juhtide tuvastamine jne. Moodulite aktiveeritusest lähtuvalt on tarbitav funktsionaalsus suurem ja see omakorda nõuab rohkem tehnilist ja analüütilist tuge. Niisamuti esitab laiem funktsionaalsus kõrgemaid nõudeid tehnilise toe operatiivsusele.
Teenuse kuumaks sisaldab SIM kaardi tasu. Sõltuvalt sellest, kus masinad liiguvad, rakendatakse erinevaid tariife. SIM kaardi tasu on fikseeritud kolme erineva piirkonna tarbeks: kohalik, euroliit ja riigid väljaspool euroliitu. Klient ei pea SIM kaartide pärast muretsema, need organiseerime ja paigaldame ise.
Alati on seadmeid võimalik kas tähtajatult või mingiks perioodiks rentida.
Rendi puhul tutvuge eelnevalt rendilepingu ja teenuse üldtingimustega ning pöörake eeskätt tähelepanu rendi lõpetamise tingimustele.
Seadmete rendihinnad on erinevad ning sarnaselt väljaostetavatele seadmetele sõltuvad need konkreetse seadme võimekusest või väärtusest. Rendihind ei sisalda paigalduse maksumust.
Teenusepakkuja on investeerinud rendiseadmetesse. Teenusepakkuja määrab rendi tasuvusaja, milleks tüüpiliselt arvestatakse 1.5 kuni 2 aastat. See on aeg, mille jooksul klient maksab teenusepakkujale kinni seadme omahinna ning kasumimarginaali. Seade ise jääb aga alatiseks teenusepakkuja omandisse.
 Selleks on API, mis on mõeldud erinevate programmide või süsteemide sidumiseks. API leiab kasutamist siis, kui tekib vajadus erinevate programmide poolt kogutud andmeid vahetada või täpsema järeltöötluse eesmärgil ühe süsteemi poolt kogutud andmeid teisele edastada. Analoogia tootmisliiniga, kus transportliin teeb ühe sõlme poolt töödeldud poolfabrikaadid automaatselt kättesaadavaks järgmisele tootmissõlmele.
Selleks on API, mis on mõeldud erinevate programmide või süsteemide sidumiseks. API leiab kasutamist siis, kui tekib vajadus erinevate programmide poolt kogutud andmeid vahetada või täpsema järeltöötluse eesmärgil ühe süsteemi poolt kogutud andmeid teisele edastada. Analoogia tootmisliiniga, kus transportliin teeb ühe sõlme poolt töödeldud poolfabrikaadid automaatselt kättesaadavaks järgmisele tootmissõlmele.
Posistsioneerimissüsteemi üheks kasulikuks võimaluseks on juhtide identifitseerimine ja masinate kasutamise eristamine erinevate juhtide lõikes. Masinas registreeritakse juhtide tööletulekud ja töö lõpetamised.
Tööaja- ja palgaarvestus toimub enamasti raamatupidamisprogrammis. See tingib tarviduse, et positsioneerimissüsteemi poolt registreeritud tööle tuleku ja töölt lahkumise sündmused oleksid kajastatud ka ühtses tööaja arvestuse süsteemis.
Väga kurnav ja vigaderohke on pidevalt käsitsi kõikide juhtide töötsükleid ühest süsteemist lugeda ning teises aknas teise süsteemi sisestada. Vähem töömahuks ja mõnevõrra kavliteetsem on perioodiandmetest „save as“ tüüpi vahetulemuse formeerimine ning nende edasilaadimine teise süsteemi. Aga ka selline lähenemine on tüütu, kuna keegi peab seda protseduuri füüsiliselt toimetama ning puudub tänapäeval nii vajalik automaatne sünkronisatsioon.
Sünkronisatsiooni puudumine viib paratamatult varem või hiljem olukorrani, kus andmete puudumise või ebatäielikkuse tõttu arvestatakse midagi valesti, tehakse vääraid otsuseid, tekib mittemõistmine või halvemal juhul isegi kaos. Seetõttu on vajalik, et kõik rutiinsed ja tüütud protseduurid oleksid lahendatud tarkvaraliselt ning võimalikult automatiseeritud.
API ehk rakendusliides pakub teistele süsteemidele võimaluse automaatseks juurdepääsuks positsioneerimissüsteemi poolt formeeritud erinevatele andmetele.
Erinevad ettevõtted omavad omaenda tellimussüsteeme, kus registreeritakse kogu protsess lõpptarbijale tarnitud toote või osutatud teenuse osas. Selles protsessis võivad sisalduda konkreetsed tarnetegevused punktist A punktini B. Need tarnetegevused võivad omakorda vabalt olla sisendiks posistioneerimissüsteemile, mille üheks võimaluseks on sihtkohtade ja töökäskude edastamine autojuhte abistavatesse navigaatoritesse.
API pakub sellisel juhul võimaluse, kus tellimussüsteemis müügimehe poolt käivitatud tellimus jõuab minimaalse viitega moonutamata kujul automaatselt täitjani. Täpne ja operatiivne.
Positsioneerimissüsteemile saab väljaspoolt ette anda sihtkohti ning töökäske. Esile saab kutsuda seadmega ühendatud juhtahelate (mootori seiskamine, käivamise blokeerimine, kesklukk vms) lülitamisi.
Klient peab endale selgeks tegema, missuguseid andmeid ta soovib ning pöörduma seejärel müügiesindaja poole. Müügiesindajalt saab klient API kirjelduse ning teemakohased selgitused.
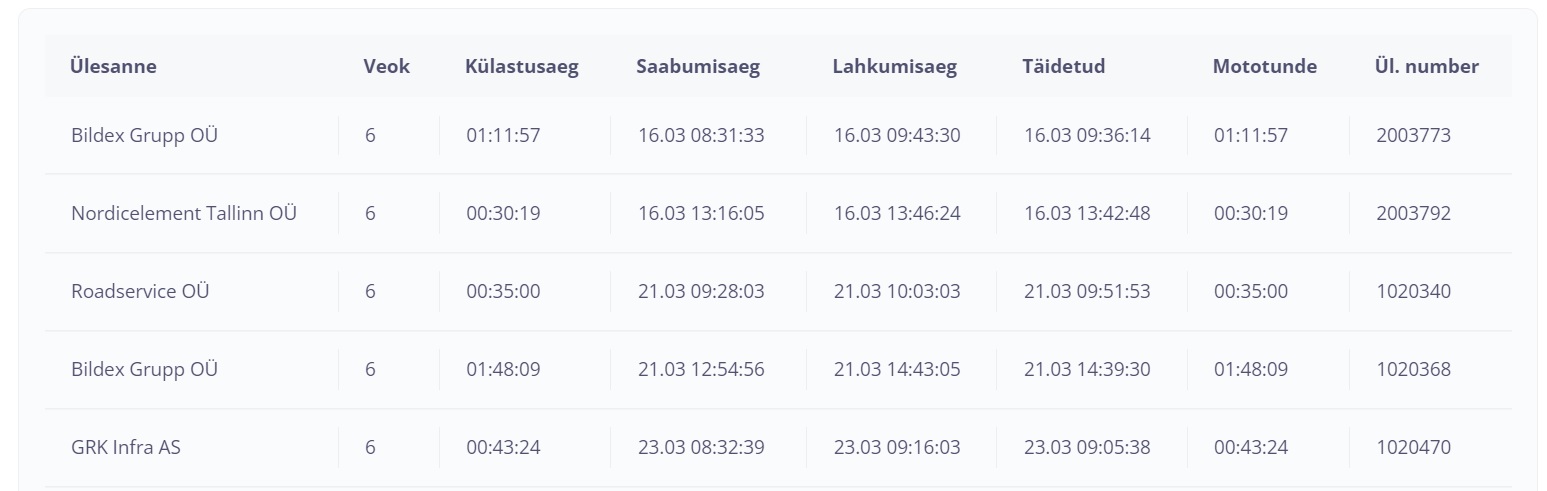
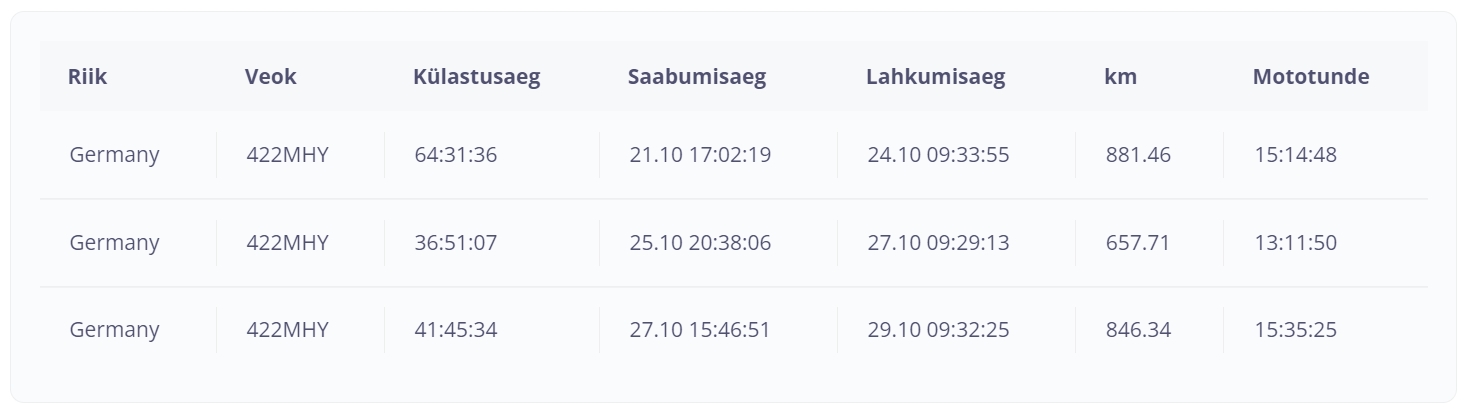
Kasutaja saab kaardile märkida alad ning geoalade aruanne kajastab, millal tema masinad alasid külastasid ning kaua seal viibisid.
Rahvusvahelist vedajat huvitab, kui pikalt on tema masinad olnud Saksamaal. Miks? Euroliidu regulatsioon nõuab näiteks Saksamaal oldud aja vältel saksa miinimumpalga maksmist autojuhile. Sama asi kehtib ka Prantsusmaal ja Austrias. Selliste meetmetega kaitsevad kõrgema palgatasemega riigid oma siseturgu Ida-Euroopa vedajate invasiooni eest. Vedajal on kohustus palgaarvestust tõestada. Geoala aruanne formeerib tõestuse mõnekümne sekundiga.
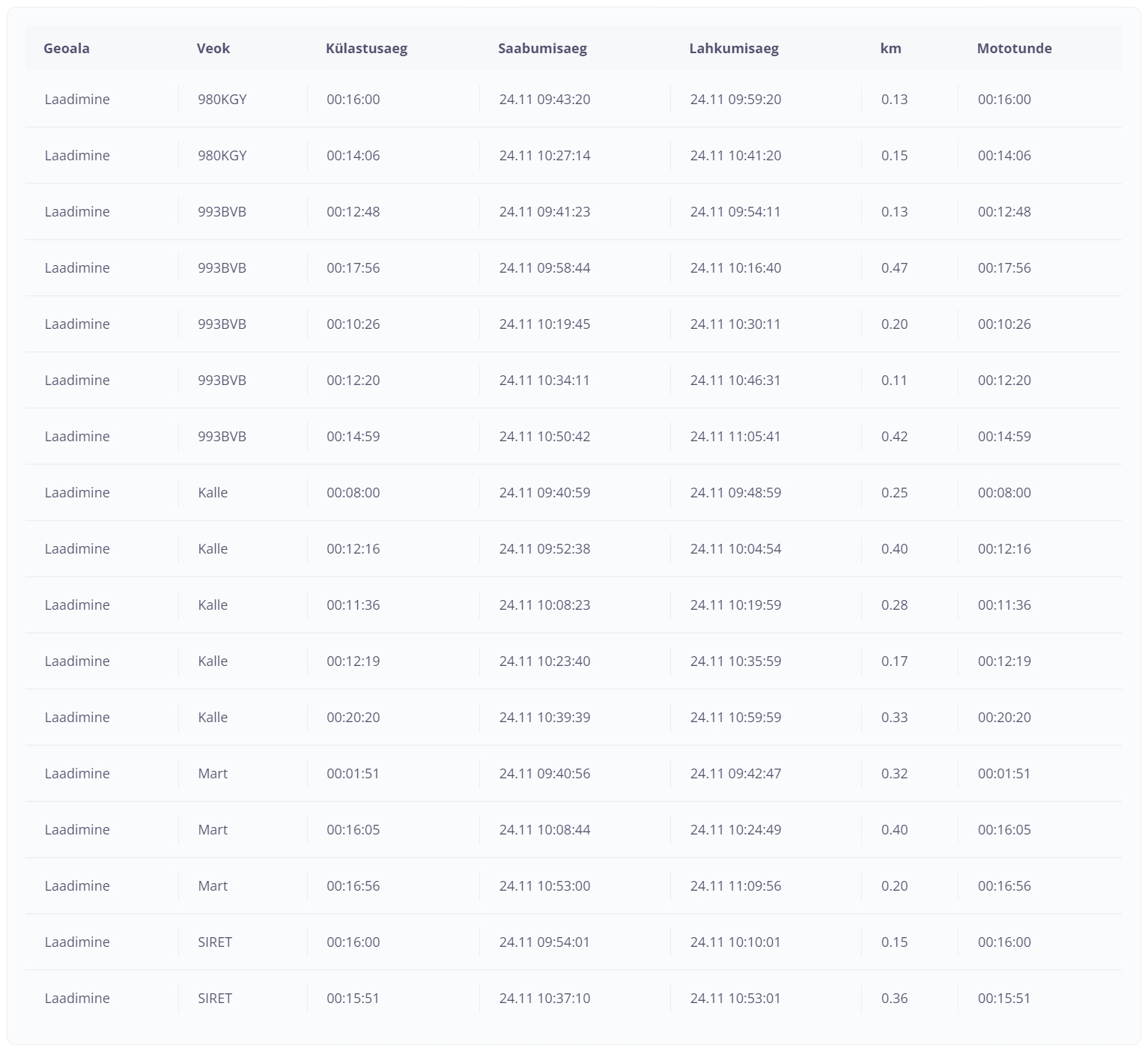
Põlevkivi rikastustehases eraldatakse maak aherainest. Maak sorteeritakse automaatsele transportliinile, aheraine punkrisse, kust see omakorda kalluritega mäkke tagasi veetakse. Tootja maksab vedajale äraveetud mahu ning mahasõidetud kilomeetrite järgi. Vedajal on tarvidus omalt poolt kontrollida, kas arvestus on õige. Kalluri veomaht on teada. Kokku tuleb lugeda punkrist erinevatesse sihtkohtadesse tehtud reisid. Vedaja märgib kaardile geoalad.

Vabalt valitud perioodi kohta formeeritud aruanne kajastab täpselt, kui mitu külastust mingi veok tegi, kui pikk oli laadimisaeg ning millal laadimised toimusid.
Kinnisvara hooldaja teostab lumetõrjet erinevate ettevõtete territooriumitel. Teenuse eest tasumine on kokkulepitud ajatariifi alusel ning teenust tuleb osutada lumikatte olemasolul automaatselt ning pidevalt. Hooldajal on tülikas pidada käsitsi arvestust, millal kellegi territoorimile siseneti, kaua töötati ja millal väljuti.
Lumelükkaja märgib kaardile erinevate firmade territooriume kujutavad geoalad. Ei mingeid akte ega aegade käsitsi fikseerimisi enam. Täpsed andmed teenuse eest arve esitamiseks formeeruvad automaatselt mõnekümne sekundi jooksul. Geoalade aruanne raporteerib, kui kaua kellegi alal koristustöid tehti.

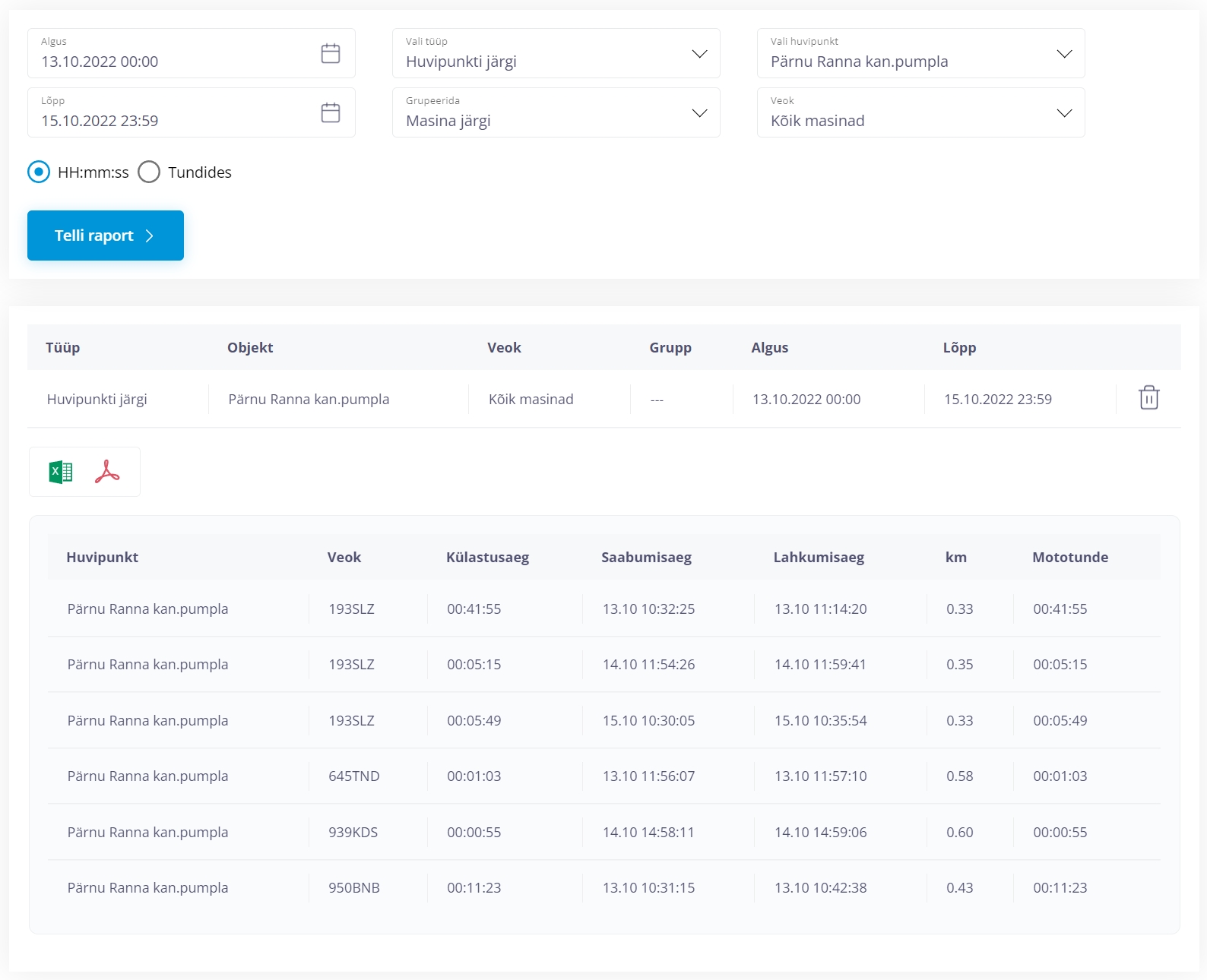
Väga sagedasti võib klientide või teenindavate sihtkohtade asukohti maha märkida ka huvipunktidena. Määrates punktile raadiuse vaatleb programm punkti ringikujulise alana ning geoalade araunne esitab kliente kajastavate punktide täpse teenindusaja, samuti saabumise ja lahkumise.
GPS ütleb täpselt, kus me oleme ja kust me tulime
Satelliidid on näidanud meile teed juba möödunud sajandi keskpaigast, aga kõik muutus 2000. aasta 1. maist, kui GPS-id hakkasid USA sõjaväe otsusel näitama asukohta mõnesaja meetri asemel mõnemeetrise täpsusega. Tänu sellele saame nüüd kasutada autonavigaatoreid, nutitelefonide kaarte ning muidugi igasuguseid kasulikke positsioneerimisteenuseid.
Ajalugu – militaarvajadusest igapäevase navigeerimiseni
Asukohamääramise vajadus on loomulikult eksisteerinud juba sajandeid, kuid muistsete meresõitjate kombel tähtede ja kuu järgi oleks enda paiknemist üsna tülikas praegu välja arvutada, ehkki sportlikust uudishimust ju võib.
Tunniajase arvutuse tulemusena on võimalik oma asukoht mõnemiilise täpsusega kindlaks määrata ka tähtede järgi, mis on oluline hädaolukorras näiteks ookeanil, kuid Läänemere-sugustes pisemates veekogudes see palju abi ei paku. Siin on oluline ilma GPS-ita olles majakate järgi orienteeruda. Kui tähed paistavad, saab põhjapoolkeral põhjasuuna leida Põhjanaela järgi, lõunapoolkeral Lõunaristi järgi. Sekstandiga, mida meresõitjad ajalooliselt on kasutanud, mõõdetakse aga väga täpselt tähe ja horisondi vaheline nurkkaugus ning arvutatakse selle põhjal merekoolis õpitu järgi oma asukoht. Mõõtmisel ei tohi vigu teha, mõõta tuleb väga täpselt, kuid kõikuvas laevas võib see üsna raske olla. Pealegi pole tähti pilves ilmaga näha.
Maamõõtjad kasutasid enne satelliidiajastut triangulatsiooni ehk maastikul üksteisega külgnevate kolmnurkade süsteemi. Triangulatsiooniks oli kogu maa kaetud riiklikult tähtsate nn kindelpunktidega, mille koordinaadid olid väga täpselt mõõdetud ja maamõõtjale teada. Sealt kindelpunktist sai mõõta maastikul märgitud kolmnurkade nurgad ja süsteemi baasjoone pikkuse, et määrata järgmiste kolmnurga nurkade koordinaadid. Muidugi võttis see palju aega ja vajas geodeedi täpseid instrumente. Turistina muidugi triangulatsiooni põhimõttel oma koordinaate leida poleks otstarbekas.
Väga täpselt saab asukoha teada satelliitide abiga
Kuid juba 50-ndatel, kui kosmosesse lendas esimene sputnik, avastasid USA sõjaväelased, kes seda jälgisid, et tegelikult oleks sputniku raadiosignaalide järgi hea ka maa peal oma asukohta määrata. Nimelt satelliidi orbiiti teades ja sellelt lähtuvaid raadiosignaale vastu võttes võis üsna täpselt määrata, kas tehiskaaslane liigub eemale või lähemale ning kui kaugel see asub. Kui on olemas vähemalt kolme satelliidi signaalid ja ülitäpne kell, siis triangulatsiooni põhimõttel peaks asukoha juba üsna täpselt saama määrata.
Sõjavägi nautiski varastest kuuekümnendatest taevast võimalust oma asukohta vastavate seadmetega määrata esialgu mereväes ja hiljem mujal, kuid tsiviilkasutajatel läks veel aega, enne kui poodidesse jõudsid koos kohvermobiilidega ka esimesed suured käsiseadmed. 1989. aastal valmis Magellanil esimene tavainimestele mõeldud GPS-seade NAV 1000: lisaks kohvrimõõtu mobiilidele tuli seiklejatel hakata nüüd väiksema tellise mõõtu asukohamäärajat kaasas kandma. Sel ajal kehtis nö selektiivne kättesaadavus, mis tähendas, et tavakasutajatele anti USA sõjaväele kuuluvat võrku kasutada vaid piiratud täpsusega mõnisada meetrit. Lennukitele ja laevadele sellest tavaliselt piisas.
Muidugi polnud mõnesajameetrine täpsus piisav näiteks autoga navigeerimiseks või võõras linnas aadressi otsimiseks. Tänapäevane GPS-ide buum sai alguse alles 2000. aasta 1. mail, mil otsustati tsiviilkasutusest asukohamääramise täpsuse segamine kõrvaldada. Kõik võisid esialgu oma asukohta 24 satelliidi abiga kümnemeetrise täpsusega määrata ja see tähendas juba ka autonavigaatorite võimalikkust.
Praeguseks on satelliitide arv kasvanud 33-ni ja mobiilid kasutavad veel ka A-GPS-i ehk täiendavat infot maapealsetest tugijaamadest, et võimalikult kiiresti oma asukoht kindlaks teha. Peale selle on GPS-seadmete täpsus juba jõudnud mõne meetrini. Nii võib üles leida seenemetsas eelmise aasta seenekobara asukoha või liigelda mitmerealisel ristmikul, kus autonavi oskab juhendada juba sõiduraja täpsusega.
GPS-e leidub tänapäeval pea kõigis nutitelefonides. Samuti on saadaval eraldi käsi-GPS-id, mis on võimsama antenni ja spetsiaalse tarkvaraga, määrates asukoha väga täpselt ja väga kiiresti. Aga kuna mobiilide GPS-id on igapäevasteks vajadusteks juba piisavalt täpsed ja kiired, siis käsi-GPS-idel enam erilist turgu pole. Samamoodi hakkavad vaikselt hääbuma autonavigaatorid, mis juhendavad autojuhte õigele teele, sest mobiiliäpid on sama head ja nagu öeldud, ka telefoni GPS-i täpsusest piisab. Aina parema täpsuse annavad kaasaskantavatele seadmetele uued ja võimsamad algoritmid, mille järgi saab üsna nõrkadest GPS-signaalidest aina rohkem asukohainfot välja lugeda, häireid arvestamata jätta ja keskmistamise ning statistiliste arvutustega leida ka kehvades levitingimustes võimalikult täpsed näidud.
Kuidas see töötab?
GPS-seade saab taevas kindlatel orbiiditel tiirlevatelt satelliitidelt vajaliku signaali ning arvutab selle põhjal asukoha laius- ja pikkuskoordinaadid ning kõrguse merepinnast. Kõrguse näit võib küll olla teinekord üsna ebatäpne, aga kallimad seadmed täpsustavad seda baromeetriga – sensoriga, mis suudab õhurõhu järgi paremini kõrgust määrata.
GPS vastuvõtja arvutab asukoha oma kauguse põhjal vähemalt neljast nähtavast satelliidist. Kaugus mõõdetakse täpselt ära, võrreldes satelliitide ja vastuvõtjate genereeritud kodeeritud signaalide ülitäpseid algus- ja lõpuaegasid. Selleks peavad satelliidid ja vastuvõtjad oskama tekitada täpselt ühel ajal signaale. Aeg, mis kulus signaalil satelliidilt valguse kiirusel vastuvõtjani jõudmiseks, annabki lihtsa arvutuse järgi kauguse. GPS vastuvõtja asukoha arvutamine on edasi juba puhas trigonomeetria, sest teada on satelliitide asukohad ja nende kaugused vastuvõtjast.
Kui asukoha koordinaadid teada, siis mobiilis kasutavad erinevad äpid seda infot näiteks kaardil teekonna salvestamiseks, lähimate poodide, tanklate või vaatamisväärsuste leidmiseks.
Muidugi on levinud tänu GPS-seadmete odavusele ja lihtsusele ka mitmesugused positsioneerimisseadmed, millega saab jälgida oma igapäevaste asjade liikumist. Tikutopsisuurune träkker ehk asukohajälgija on paigaldatav nii reisikohvrisse, autosse, murutraktorisse kui koera kaelarihmale. Üle mobiilse andmeside edastab selline GPS-seade oma asukoha mõnesse veebiteenusesse, kust saab jälgida hetkeasukohta, vaadata läbitud teekondi ja ajalugu või lisada alarme, kui mõni seade näiteks lahkub või jõuab märgistatud piirkonda. Nii on näiteks hea teada saada, kui koer on aiast põgenenud või millal laps koolist koju jõuab. Võimalusi on piiritult.
Kuidas siis lihtsustatult toimub teoorias asukohamääramine tähtede ja päikese järgi?
Tähistaevast on inimesed vaadelnud aastatuhandeid ning selle muster on pika aja vältel inimeste teadvuses kinnistunud. Samuti on kinnistunud teadmine taeva n.ö „pöörlemisest“ ümber mingi keskpunkti .Põhjapoolkeral on selleks keskpunktiks Põhjanael. Astronoomiast teame, et tähtkujude näiv liikumine pole tingitud mitte taevasfääri vaid Maa pöörlemisest. Põhjanael asetseb kõrgel põhjapooluse kohal ning selle asukoht „kõigub“ pool kraadi. Põhjanael näitab meile alati põhja suunda. Nurk horisondi ja põhjanaela vahel ongi laiuskraad , millel asume. Selle mõõtmiseks kasutatakse sekstanti. Jämedalt öeldes on see sirkel, mille haarade vahele kinnitub mall. Sirkli üks haar tuleb suunata horisondile, teine Põhjanaelale ning malli poolt mõõdetud haaradevaheline nurk on mõõtepunkti laiuskraad. Väga lihtne on seda ette kujutada, kui mõtled ennast põhjapoolusele, asetad sirkli üht haara pidi maapinnale, suunad teise haara täpselt pea kohal paiknevale Põhjanaelale ning saadki haarade vaheliseks nurgaks 90 kraadi.
Pikkuskraadi määramiseks tuleb selgeks teha, kui palju erineb keskpäeva aeg antud asukohas Greenwichi ajast. Appi tuleb kronomeeter, mis mõõdab Greenwichi aega (Greenwichi keskpäeva). Päikespaistelise ilmaga on kohaliku aja keskpäevaks moment, kui vari on kõige lühem (päike asetseb mõõtepunkti meridiaanis). Fikseeri kronomeetri näit ja arvuta erinevus kohaliku keskpäeva (12:00) suhtes. Arvestades, et 1 kraadise pöörde (ekvaatoril 111km) teeb Maa 4 minutiga saame kohaliku ja Greenwichi aja erinevuse järgi pikkuskraadi välja arvutada.
Kronomeetrid tulid kasutusele 250 aastat tagasi. Enne seda navigeeriti sisuliselt ainult laiuskraadi järgi. Sõideti konkreetsele laiuskraadile, sealt edasi muudeti kurssi 90 kraadi ning hoiti seda, kuni kusagile välja jõuti. Üsna ebatäpne ja aeganõudev. Kronomeetri väljaarendamist forsseeris 1707.a. asetleidnud õnnetus, kui 4 Briti sõjalavaeva sõitis karidele ning hukkus 1400 meremeest. Huvitava artikli kronomeetri arendusajaloo kohta leiad Tehnikamaailmast http://www.tehnikamaailm.ee/250-aastat-kronomeetrit/
Navigeeriti enne GPS-i ja jõuti samuti kohale
Kaasaegne GPS navigeerimine on alles mõnikümmend aastat vana, kuid omaenda asukohta osati määrata ammu enne satelliitide tulekut. Kohati on see oskus tänaseks isegi elukutselistel meremeestel ununenud, kuid nutitelefonide ja naviseadmete kõrval on siiski kasulik teada, mida teha siis, kui taevast signaali ei tule või kui taskuseadmel on aku tühjaks saanud.
 Majakad ja kaardid on eksisteerinud juba aastasadasid, isegi aastatuhandeid. Tähed näitasid öösel teed, iidsed meresõitjad hoidsid kaldaga silmsidet ja kaugele avamerele ei läinudki. Nii õnnestus asustada kipakate paatidega ka Vaikse ookeani saared, mis üksteisele piisavalt lähedal ja kus selget taevast öösiti väga palju.
Majakad ja kaardid on eksisteerinud juba aastasadasid, isegi aastatuhandeid. Tähed näitasid öösel teed, iidsed meresõitjad hoidsid kaldaga silmsidet ja kaugele avamerele ei läinudki. Nii õnnestus asustada kipakate paatidega ka Vaikse ookeani saared, mis üksteisele piisavalt lähedal ja kus selget taevast öösiti väga palju.
Tuhandeid aastaid tagasi ületati Lõuna-Hiina merd ja India ookeani mussoonidega, kuna need olid alati kindlas suunas püsivalt puhuvad tuuled ja lubasid avamerd kaks korda aastas taganttuule jõul ületada ilma ära eksimist kartmata. Samas kasutasid kaugel põhjas elavad islandlased spetsiaalset siledaks poleeritud (valgust polariseerivat) kristalli – nn päikesekivi, et leida päikese asukoht ka pilves ilmaga, mida põhjapoolsetel meredel kohtab tihti. Päikese järgi sai samuti ligikaudselt suunda ja asukohta määrata.
Kompass – üsna värske leiutis
Kompass, mis tundub tänapäeval nii lihtne tööriist, leiutati Hiinas alles paarsada aastat enne Kristust ja Euroopasse jõudis see pärslastega 13. sajandil. Kompassinõela teravik on magnetiseeritud ja see laseb noolel maa magnetväljale vastavalt võtta suuna põhja-lõuna suunas. Kompassid muutsid meresõidu ja teedeta aladel rändamise oluliselt lihtsamaks, seeläbi täpsustusid kaardid ning isegi Eesti rannik võttis keskaegsetel joonistel juba äratuntava kuju.
Põhjanael – mismoodi selle järgi oma asukoht kindlaks määrata?
 Väga vana ja kindel viis oma asukohta määrata, kui kompassi pole käepärast, on Põhjanaela järgi. See ere täht aitab põhjapoolkeral leida põhjasuuna, sest asub alati taevas justnagu põhjapooluse kohal. Kui suund käes, saab määrata ka oma laiuskraadi – tähe tõusunurk on ligikaudu sama kui laiuskraad.
Väga vana ja kindel viis oma asukohta määrata, kui kompassi pole käepärast, on Põhjanaela järgi. See ere täht aitab põhjapoolkeral leida põhjasuuna, sest asub alati taevas justnagu põhjapooluse kohal. Kui suund käes, saab määrata ka oma laiuskraadi – tähe tõusunurk on ligikaudu sama kui laiuskraad.
Aegvõttega tähistaevast pildistades on näha – kõik tiirleb Põhjanaela ümber. See suund ongi põhjasuund ja tõsunurk horisondi suhtes määrab vaatleja laiuskraadi. Foto: (CC) Kevin Hadley / Wikipedia
Oma laius- ja pikkuskraadi täpseks määramiseks on vaja veel teada ka täpset kellaaega, mida 16. sajandini määrati liiva- ja veekellade abiga. 1760ndatel õnnestus ehitada selline laevakell, mis näitaks õiget aega ka kõikuval alusel ja lubas lõpuks ometi asukohta määrata igasuguse ilmaga.
Sekstant – täpne nurgamõõtja täpse asukoha jaoks
 Sekstant ilmus navigatsiooniarsenali alles 1757. aastal. Seda kasutatakse siiani varuvariandina kui elekter või elektroonika peaksid üles ütlema. Sekstandiga saab täpselt mõõta mistahes taevakeha nurga horisondi suhtes ja seejärel arvutada kellaaja järgi täpse laiuskraadi. Öösel saab Põhjanaela järgi leida nii suuna kui ka määrata laiuskraadi.
Sekstant ilmus navigatsiooniarsenali alles 1757. aastal. Seda kasutatakse siiani varuvariandina kui elekter või elektroonika peaksid üles ütlema. Sekstandiga saab täpselt mõõta mistahes taevakeha nurga horisondi suhtes ja seejärel arvutada kellaaja järgi täpse laiuskraadi. Öösel saab Põhjanaela järgi leida nii suuna kui ka määrata laiuskraadi.
Tööpõhimõttelt on tegu optilise riistaga, mis võimaldab kahe objekti kujutise peeglite abil samas vaateväljas ühitada. Peeglite asendit muudetakse reguleerimiskruvi abil selliselt, et vaadeldava taevakeha asukoht projitseerub vaatlustorus horisondile. Mõõdetud nurga väärtus loetakse seejärel reguleerimiskruvi trumlilt. Nagu näha on nurga määramine elementaarne. Keerulisem on teostada kellaajast tingitud arvutusi.
Raadio juhatab teed
1906. aastal kasutati esimest korda raadioühendust, et suunda määrata – laevale paigaldati seade, mida pöörates sai täpselt teada raadiosignaali allika. Nii tekkisid esimesed raadiomajakad, mis andsid suuna sadamale kätte ka kaugel silmapiiri taga olevatele laevadele.
1930ndatel tulid esimesed autonavigaatorid – vahelepõikena võib öelda, et need polnud mingid tehnoloogilised kõrgsaavutused, vaid auto armatuurlauale kinnitatavad keeratavad kaardirullid, mida sai kaassõitja liigutada vastavalt sellele kuhu teeristile jõuti.
II maailmasõja ajal sai valmis esimene raadionavigatsiooni lahendus meresõitjatele – LORAN, mis nelja tugijaamaga aitas navigeerida USA ja Kanada idarannikul.
Sputnikule järgnesid sidesatelliidid juba mõne aasta pärast
 Satelliidiajastu alguseks võib küll lugeda 1957. aastat, kui Nõukogude Liit esimese sputniku ehk tehiskaaslase orbiidile saatis, aga GPS-navigatsiooni laadse lahenduse alguseks võib pidada 1962. aastat, kui seitsmest satelliidist koosnev TRANSIT süsteem aitas maa pealt oma asukohta määrata – küll väga ligikaudselt. Kuid sekstandi ja kompassigaga võrreldes oli süsteem kiirem ja kindlam, ehkki täpsus veel eriti hea polnud.
Satelliidiajastu alguseks võib küll lugeda 1957. aastat, kui Nõukogude Liit esimese sputniku ehk tehiskaaslase orbiidile saatis, aga GPS-navigatsiooni laadse lahenduse alguseks võib pidada 1962. aastat, kui seitsmest satelliidist koosnev TRANSIT süsteem aitas maa pealt oma asukohta määrata – küll väga ligikaudselt. Kuid sekstandi ja kompassigaga võrreldes oli süsteem kiirem ja kindlam, ehkki täpsus veel eriti hea polnud.
Edasi läks satelliitnavigatsioon aina täpsemaks, kuni 2000. aasta 1. maist hakkasid USA sõjaväe otsusel GPS-id näitama asukohta mõnesaja meetri asemel mõnemeetrise täpsusega. Nüüd võime mobiilis, nutikellas või eraldi naviseadmes asuva GPS-i abiga enda asukoha määrata juba meetrise täpsusega. Tavaliselt sellest piisab, et leida üles õige tee või vajalik peatuskoht.
Tsiviilkasutajale muutus GPS signaal navigeerimiskõlbulikuks aastal 2000. Erinevaid teejuhte sihtkohta jõudmiseks kasutati aga juba mitusada aastat varem. Nendeks olid esmalt mehaanilised, hiljem juba elektroonilised vahendid.
02.01-14.01.2017 kestval Dakari rallil kasutasid Eesti mootorratturid juba 100 aastat kasutusel olnud töökindlad kaardirullikud. Neist on müra ja tolmu sees mõnikord rohkem abi kui klassikalistest navigaatoritest. Lisaks saab sellistele rullidele kanda ka rajalegendi ja saada aimu ees ootavatest kurvidest.
Kõige esimesed autonavigaatorid olid üsnagi primitiivsed kaardirullid, mis kinnitati auto armatuurlauale ja mida liikumisele vastavalt käsitsi edasi krutiti.
Analoogsed kaardirullid olid rändajate taskutes kasutusel olnud juba mitu sajandit, kuid autodesse jõudsid esmakordselt 1920-ndatel.
Osavad peenmehaanikud monteerisid rullid käekellasuurusesse korupsesse, mille sai mugavalt kellarihmaga randmele kinnitada.
 The Plus Fours Routefinderi nimeline süsteem sisaldas kahe rulliga korpust, rullidele tuli osta tšekiprinteri paberirullile sarnanev kaardirull, mis juhatas mõnest tuntud punktist A teise tuntud punkti B. Ristmikel tuli kaarti käsitsi nupust edasi kerida ja siis liikuda järgmisele hargnemisele. Lisaks jooksid kaardiservas ka läbitud miilid.
The Plus Fours Routefinderi nimeline süsteem sisaldas kahe rulliga korpust, rullidele tuli osta tšekiprinteri paberirullile sarnanev kaardirull, mis juhatas mõnest tuntud punktist A teise tuntud punkti B. Ristmikel tuli kaarti käsitsi nupust edasi kerida ja siis liikuda järgmisele hargnemisele. Lisaks jooksid kaardiservas ka läbitud miilid.
Paraku see leiutis kuigi laialdaselt kasutusele ei jõudnud ning läks pigem 20. sajandi veidruste hulka, olles praegu Londonis Briti raamatukogus väljas põneva tehnikaajaloo eksemplarina. Nüüd võib kavala leiutise kohta öelda, et see oli veel liiga ajast ees, sest 1920-ndatel liikus väga vähe autosid, et selline seade massidesse oleks jõudnud. Samuti oli teede valik saadaolevatel kaartidel üsna piiratud.
 1930ndatel oli juba autosid tänavatel rohkem, nii et võis mõelda ka nende navigatsiooni-lisavarustuse peale. Üks esimesi oli Itaalias toodetud Iter Avto – armatuurlauale kinnitatav korpus, millel avar aken kaardilugemiseks. Pealtnäha meenutas see juba kohmakat suurt autonavigaatorit tänapäevast, kuid veel mehaanilise kaardisüsteemiga.
1930ndatel oli juba autosid tänavatel rohkem, nii et võis mõelda ka nende navigatsiooni-lisavarustuse peale. Üks esimesi oli Itaalias toodetud Iter Avto – armatuurlauale kinnitatav korpus, millel avar aken kaardilugemiseks. Pealtnäha meenutas see juba kohmakat suurt autonavigaatorit tänapäevast, kuid veel mehaanilise kaardisüsteemiga.
Võrreldes Plus Fours Routefinderiga oli tegemist juba sammuga edasi – kaarti ei pidanud käsitsi edasi kerima, vaid seade oli ühendatud spidomeetritrossiga ja nihutas rulli vastavalt sõidukiirusele enam-vähem õiges tempos edasi. Kallis lisavidin näitas ristmikke ja „pööras“ kaardi alati sõidusuunas. Aeg-ajalt tuli kaardikerimise tempot korrigeerida, sest selline mehaaniline lahendus ei saanud olla väga täpne.
 1960-ndatel otsustas General Motors pikkadel USA maanteedel ristlevatele sõiduautodele abiks luua seadme DAIR (Driver Aid, Information & Routing), mis loeb perfokaartidelt maanteeinfot (kust tuleb ära pöörata, millised liiklusmärgid on teel, kus algab kiiruspiirang ja kui kaua peab veel otse sõitma), lisaks aga sai raadio teel infot teelolevate takistuste ja avariiolukordade kohta.
1960-ndatel otsustas General Motors pikkadel USA maanteedel ristlevatele sõiduautodele abiks luua seadme DAIR (Driver Aid, Information & Routing), mis loeb perfokaartidelt maanteeinfot (kust tuleb ära pöörata, millised liiklusmärgid on teel, kus algab kiiruspiirang ja kui kaua peab veel otse sõitma), lisaks aga sai raadio teel infot teelolevate takistuste ja avariiolukordade kohta.
60ndate lõpus jätkus autonavigaatorite areng juba väljaspool autot – Saksamaal katsetati nn nutikaid maanteid, kus asusid väikesed raadiomajakad, mis andsid autos olevale seadmele lisainfot. Kõigepealt muidugi ütlesid majakad, kus asutakse, aga neilt sai ka muutuvat infot teeolude ja kiirusepiirangute kohta. Siiski oli ka see süsteem omast ajast ees ja testmaanteedele lisaks tavamaanteid nutikaks veel lähimal poolsajandil ei tehtud.
1995. aastal tuligi Oldsmobile välja GPS-signaali kasutava esialgu üsna ebatäpse, kuid linnadevahelisel maanteel abiks oleva GuideStariga, millel oli elektrooniline tabloo ja GPS-signaali vastuvõtja. Satelliitidel põhinev autonavigaator oli teemaks ka tulevikulahendusi tutvustavas saatesarjas „Beyond 2000“, olles sama kuum sõna kui praegu isejuhtivad autod. Ehkki siis nenditi, et kuitahes hea navigatsiooniseade ei asenda korralikku autojuhti.
Video: https://youtu.be/NCGmxk3H44g?t=6m20s
(Autonavigatsiooni osa algab 6:20)


